Оцените 2-D ограничивающий прямоугольник в системе координат камеры 3-D используя ограничивающий прямоугольник в лидарной системе координат
bboxesCamera = bboxLidarToCamera(bboxesLidar,intrinsics,tform)bboxesLidar. Функция использует внутренние параметры камеры intrinsics и матрицу преобразования лидара в камеру tform.
bboxesCamera = bboxLidarToCamera(bboxesLidar,intrinsics,tform,L)L. L - соответствующее маркированное 2-D изображение 2-D ограничивающих рамок, где объекты помечены отдельно.
[ указывает, для какого из заданных 3-D ограничивающих рамок функция обнаруживает соответствующий 2-D ограничивающий прямоугольник в системе координат камеры.bboxesCamera,boxesUsed] = bboxLidarToCamera(___)
[___] = bboxLidarToCamera(___,'ProjectedCuboid',true) возвращает 3-D проективные кубоиды вместо 2-D ограничивающих прямоугольников.
Загрузите достоверные данные из файла MAT в рабочую область. Извлеките изображение, данные облака точек и собственные параметры камеры из достоверных данных.
dataPath = fullfile(toolboxdir('lidar'),'lidardata','lcc','bboxGT.mat'); gt = load(dataPath); im = gt.im; pc = gt.pc; intrinsics = gt.cameraParams;
Извлеките лидар в матрицу преобразования камеры из достоверных данных.
tform = gt.camToLidar.invert;
Извлеките 3-D информацию об ограничивающем прямоугольнике.
bboxLidar = gt.cuboid1;
Оцените 2-D ограничивающий прямоугольник на изображении.
bboxesCamera = bboxLidarToCamera(bboxLidar,intrinsics,tform);
Отобразите 3-D ограничивающий прямоугольник, наложенный на облако точек.
pcshow(pc.Location,pc.Location(:,1))
showShape('cuboid',bboxLidar)
Отобразите 2-D ограничивающий прямоугольник, наложенный на изображение.
J = undistortImage(im,intrinsics); annotatedImage = insertObjectAnnotation(J,'Rectangle',bboxesCamera,'Vehicle'); imshow(annotatedImage)

Загрузите достоверные данные из файла MAT в рабочую область. Извлеките изображение, данные облака точек и собственные параметры камеры из достоверных данных.
dataPath = fullfile(toolboxdir('lidar'),'lidardata','lcc','bboxGT.mat'); gt = load(dataPath); im = gt.im; pc = gt.pc; intrinsics = gt.cameraParams;
Извлеките лидар в матрицу преобразования камеры из достоверных данных.
tform = gt.camToLidar.invert;
Извлеките 3-D информацию об ограничивающем прямоугольнике.
bboxLidar = gt.cuboid2;
Оцените проективный 3-D ограничивающий прямоугольник на изображении.
bboxesCamera = bboxLidarToCamera(bboxLidar,intrinsics,tform,... 'ProjectedCuboid',true);
Отобразите 3-D ограничивающий прямоугольник, наложенный на облако точек.
figure
pcshow(pc.Location,pc.Location(:,1))
showShape('cuboid',bboxLidar)
Отобразите 3-D проективный ограничивающий прямоугольник, наложенный на изображение.
J = undistortImage(im,intrinsics); h = imshow(J); pcH = vision.roi.ProjectedCuboid; pcH.Parent = h.Parent; pcH.Position = bboxesCamera;

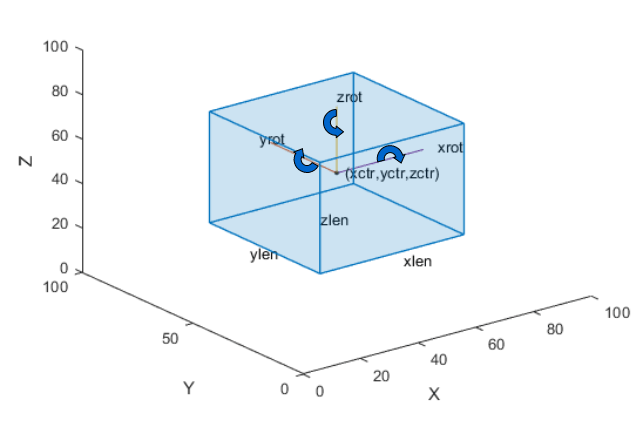
bboxesLidar - 3-D ограничительные рамки в лидарной системе координатcuboidModel | объекта N -by-9 матрица вещественных значений3-D ограничительные рамки в лидарной системе координат, заданные как cuboidModel объект или N -by-9 матрица вещественных значений. N - количество 3-D ограничивающих рамок. У каждой строки матрицы есть форма [x центр
y центр z
гниль центра <reservedrangesplaceholder5> len <reservedrangesplaceholder4> len <reservedrangesplaceholder3> len <reservedrangesplaceholder2> y гниль z гниль].
x ctr, y ctr и z ctr - Эти значения определяют x -, y - и z - координаты оси, соответственно, центра кубоидного ограничивающего прямоугольника.
x len, y len и z len - Эти значения задают длину кубоида вдоль оси x -, y - и z - соответственно перед поворотом.
x гниль, y гниль и z гниль - Эти значения определяют углы поворота кубоида вокруг оси x -, y - и z - соответственно. Эти углы являются положительными по часовой стрелке, когда вы смотрите в прямом направлении их соответствующих осей.
Этот рисунок показывает, как эти значения определяют положение кубоида.
Примечание
Функция принимает, что данные облака точек, которые соответствуют 3-D ограничивающим рамкам, и данные изображения синхронизируются по времени.
Типы данных: single | double
intrinsics - Внутренние параметры камерыcameraIntrinsics объектВнутренние параметры камеры, заданные как cameraIntrinsics объект.
tform - Камера к лидарному твердому преобразованиюrigid3d объектКамера к лидарному твердому преобразованию, заданная как rigid3d объект.
L - Маркированное 2-D изображениеПомеченное 2-D изображение, заданное как матрица вещественных значений. Размер матрицы такой же, как и у ImageSize свойство intrinsics.
Примечание
Маркированные изображения приняты неискаженными.
Типы данных: single | double | int8 | int16 | uint8 | uint16
