Проект формирования цикла с использованием метода Гловера-Макфарлейна
ncfsyn реализует способ разработки контроллеров, который использует комбинацию формирования цикла и устойчивой стабилизации, как предложено в [1][2]-. Функция вычисляет нормализованный coprime контроллер формирования цикла фактора перчаточника-McFarlane <reservedrangesplaceholder4> K для объекта G с весами <reservedrangesplaceholder1> 1 предварительного компенсатора и посткомпенсатора и <reservedrangesplaceholder0> 2. Функция принимает положительную обратную связь строения из следующего рисунка.
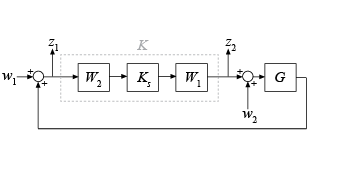
Чтобы задать отрицательную обратную связь, замените G на - G. Контроллер Ks стабилизирует семейство систем, заданное шаром неопределенности в нормализованных простых факторах формируемого объекта Gs = W 2 G W 1. Конечный контроллер K возвращенncfsyn получается как K = W 1 Ks W 2.
[ вычисляет H Гловера-Макфарлейна ∞ нормализованного контроллера формирования контура общего фактора K,CL,gamma,info] = ncfsyn(G)K для объекта G, с W 1 = W 2 = I. CL - система с обратной связью от возмущений w 1 и w 2 до выходов z 1 и z 2. Функция также возвращает H ∞ эффективность gammaи структуру, содержащую дополнительную информацию о результате.
ncfsynИспользование ncfsyn для разработки контроллера для следующего объекта.
G = tf([1 5],[1 2 10]);
Используйте функции взвешивания, которые приводят к формованному объекту W1*G*W2 с высоким усилением для нарушения порядка ниже 0,1 рад/с и низким усилением для хорошей устойчивой устойчивости выше около 5 рад/с. Для этого Gдостаточен только вес предкомпенсатора.
W1 = tf(1,[1 0]); bodemag(W1*G) grid

Вычислите контроллер.
[K,CL,gamma,info] = ncfsyn(G,W1);
Оптимальная стоимость gamma связана с нормализованным запасом устойчивости системы по 1/gamma = ncfmargin(Gs,-Ks). (Знак минус нужен, потому что ncfmargin принимает цикл отрицательной обратной связи, в то время как ncfsyn вычисляет контроллер положительной обратной связи.)
b = ncfmargin(info.Gs,-info.Ks); [gamma 1/b]
ans = 1×2
1.4508 1.4508
Сравните достигнутые и целевые формы цикла.
sigma(G*K,G*W1) legend('achieved','target')

В то время как ncfmargin принимает цикл отрицательной обратной связи, ncfsyn команда проектирует контроллер для цикла положительной обратной связи. Поэтому вычислить запас можно с помощью контроллера, разработанного с ncfsyn, использовать [marg,freq] = ncfmargin(G,K,+1).
Возвращенный контроллер K = <reservedrangesplaceholder5> 1 <reservedrangesplaceholder4> <reservedrangesplaceholder3> 2, где Ks оптимальный контроллер <reservedrangesplaceholder1> , который минимизирует стоимость <reservedrangesplaceholder0>
Оптимальная эффективность - это минимальная стоимость
Предположим, что Gs = NM–1, где N (<reservedrangesplaceholder8>) * N (<reservedrangesplaceholder6>) + M (<reservedrangesplaceholder4>) * M (<reservedrangesplaceholder2>) = I, нормализованная coprime факторизация (NCF) взвешенной модели объекта управления Gs. Затем теория гарантирует, что система управления остается устойчивой для любого возмущения к Gs формы
где Δ1, Δ2 являются стабильной парой, удовлетворяющей
Цель H ∞ -norm с обратной связью имеет стандартную интерпретацию усиления сигнала. Наконец, можно показать, что контроллер, Ks, существенно не влияет на форму контура в частотах, где коэффициент усиления W 2 GW 1 является либо высоким, либо низким, и гарантирует удовлетворительные пределы устойчивости в частотной области пересечения коэффициента усиления. В настройке регулятора конечный контроллер, который будет реализован, является K = W 1 Ks W 2.
Для получения дополнительной информации см. McFarlane and Glover [1] - [2].
[1] McFarlane, D.C., and K. Glover, Robust Controller Design using Normalized Coprime Factor Plant Descriptions, Springer Verlag, Lecture Notes in Control and Information Sciences, voes, vol. 138, 1989.
[2] McFarlane, D.C., and K. Glover, «A Loop Shaping Design Procedure Using Synthesis», Транзакции IEEE по автоматическому управлению, том 37, № 6, стр. 759 - 769, июнь 1992.
[3] Винникомб, Г., «Измерение робастности систем обратной связи», докторская диссертация, инженерный факультет, Кембриджский университет, 1993.
[4] Zhou, K., and J.C. Doyle, Essentials of Robust Control. Нью-Йорк: Prentice Hall, 1998.
