Мультидатчик, средство отслеживания мультиобъекта PHD
Система trackerPHD object™ является средством отслеживания, способным к обработке обнаружений нескольких целей от нескольких датчиков. Средство отслеживания использует мультицелевой фильтр плотности гипотезы вероятности (PHD), чтобы оценить состояния целей точки и расширенных объектов. PHD является функцией, определяемой по пространству состояний системы слежения, и ее значение в состоянии задано как ожидаемое количество целей на модульный объем пространства состояний. PHD представлен взвешенным суммированием (смесь) функций плотности вероятности и достигает максимума в PHD, соответствуют возможным целям. Для обзора того, как средство отслеживания функционирует, см. Алгоритмы.
По умолчанию trackerPHD может отследить расширенные объекты с помощью фильтра ggiwphd, какие обнаружения моделей от расширенного объекта, когда синтаксический анализ указывает облаку. Входные параметры к средству отслеживания являются отчетами обнаружения, сгенерированными objectDetection, radarSensor, monostaticRadarSensor, irSensor или объектами sonarSensor. Средство отслеживания выходные параметры все сохраняемые дорожки и их информация об анализе.
Отслеживать цели с помощью этого объекта:
Создайте объект trackerPHD и установите его свойства.
Вызовите объект с аргументами, как будто это была функция.
Чтобы узнать больше, как Системные объекты работают, смотрите то, Что Системные объекты? MATLAB.
tracker = trackerPHDtracker = trackerPHD(Name,Value)tracker = trackerPHDtrackerPHD со значениями свойств по умолчанию.
tracker = trackerPHD(Name,Value)trackerPHD('MaxNumTracks',100) создает средство отслеживания PHD, которое позволяет максимум 100 дорожек. Заключите каждое имя свойства в кавычки.
Если в противном случае не обозначено, свойства являются ненастраиваемыми, что означает, что вы не можете изменить их значения после вызова объекта. Объекты блокируют, когда вы вызываете их, и функция release разблокировала их.
Если свойство является настраиваемым, можно изменить его значение в любое время.
Для получения дополнительной информации об изменении значений свойств смотрите Разработку системы в MATLAB Используя Системные объекты (MATLAB).
SensorConfigurations — Настройки отслеживания датчиковtrackingSensorConfigurationНастройка отслеживания датчиков, заданных как массив ячеек объектов trackingSensorConfiguration. Это свойство обеспечивает конфигурационную информацию датчика отслеживания, такую как пределы обнаружения датчика и разрешение датчика, к средству отслеживания. Обратите внимание на то, что нет никаких значений по умолчанию для свойства SensorConfigurations, и необходимо задать свойство SensorConfigurations перед использованием средства отслеживания. Однако можно обновить настройку путем установки свойства HasSensorConfigurationsInput на true и определения входа настройки, config. Если вы устанавливаете свойство MaxDetsPerObject объекта trackingSensorConfiguration к 1, средство отслеживания создает только один раздел, такой, что самое большее одно обнаружение может быть присвоено каждой цели.
PartitioningFcn — Функционируйте, чтобы разделить обнаружения в ячейки обнаружения@partitionDetections (значение по умолчанию) | указатель на функцию | вектор символовФункция, чтобы разделить обнаружения в ячейки обнаружения, заданные как указатель на функцию или как вектор символов. Когда каждый датчик может сообщить о больше чем одном обнаружении на объект, функция раздела требуется. Функция раздела сообщает обо всех возможных разделах обнаружений от датчика. В каждом разделе обнаружения разделены на взаимоисключающие ячейки обнаружения, приняв, что каждая ячейка обнаружения принадлежит одному расширенному объекту.
Можно также задать собственную функцию раздела обнаружений. Для руководства в записи этой функции можно исследовать детали функции разделения значения по умолчанию, partitionDetections, с помощью команды type как:
type partitionDetectionsПример:
@myfunction или 'myfunction'
Типы данных: function_handle | char
BirthRate — Уровень рождаемости новых целей в плотности1e-3 (значение по умолчанию) | положительный действительный скалярУровень рождаемости новых целей в плотности, заданной как скаляр. Уровень рождаемости указывает на ожидаемое количество целей, добавленных в плотности в единицу времени. Плотность рождения создается при помощи FilterInitializationFcn trackingSensorConfiguration, используемого со средством отслеживания. В целом средство отслеживания добавляет компоненты в функцию плотности двумя способами:
Прогнозирующая плотность рождения – плотность, инициализированная FilterInitializationFcn, функционирует, когда названо без входных параметров.
Адаптивная плотность рождения – плотность, инициализированная FilterInitializationFcn, функционирует, когда названо входными параметрами обнаружений. Обнаружения выбраны средством отслеживания на основе их логарифмической вероятности связи с текущими оценками целей.
Обратите внимание на то, что значение для свойства BirthRate представляет суммирование и прогнозирующей плотности рождения и адаптивной плотности рождения для каждого временного шага.
Пример: 0.01
Типы данных: single | double
DeathRate — Уровень смертности компонентов в плотности1e-6 (значение по умолчанию) | положительный действительный скалярУровень смертности компонентов в плотности, заданной как скаляр. Уровень смертности указывает на уровень, на котором компонент исчезает в плотности после одного временного шага. Уровень смертности относится к вероятности выживания (P s) компонента между последовательными временными шагами
![]()
где Δ T является временным шагом.
Пример: 1e-4
Типы данных: single | double
AssignmentThreshold — Порог выбора обнаружений для инициализации компонента25 (значение по умолчанию) | действительная положительная скалярная величинаПорог выбора обнаружений для инициализации компонента, заданной как положительная скалярная величина. Во время исправления средство отслеживания вычисляет вероятность ассоциации между существующими дорожками и ячейками обнаружения. Если вероятность ассоциации (данный отрицательной логарифмической вероятностью) ячейки обнаружения ко всем существующим дорожкам выше, чем порог (что означает, что ячейка обнаружения имеет низкую вероятность ассоциации к существующим дорожкам), ячейка обнаружения используется, чтобы инициализировать новые компоненты в адаптивной плотности рождения.
Пример: 18.1
Типы данных: single | double
ExtractionThreshold — Порог для инициализации предварительной дорожки0.5 (значение по умолчанию) | действительная положительная скалярная величинаПорог для инициализации предварительной дорожки, заданной как скаляр. Если вес компонента выше, чем порог, заданный свойством ExtractionThreshold, компонент маркирован как дорожка 'Tentative' и дан TrackID.
Пример: 0.45
Типы данных: single | double
ConfirmationThreshold — Порог для подтверждения дорожки0.8 (значение по умолчанию) | действительная положительная скалярная величинаПорог для подтверждения дорожки, заданного как скаляр. В объекте trackerPHD дорожка может иметь несколько компонентов, совместно использующих тот же TrackID. Если суммирование веса компонентов предварительной дорожки выше, чем порог, заданный свойством ConfirmationThreshold, состояние дорожки отмечено как 'Confirmed'.
Пример: 0.85
Типы данных: single | double
DeletionThreshold — Порог для удаления компонента1e-3 (значение по умолчанию) | действительная положительная скалярная величинаПорог для удаления компонента, заданного как скаляр. В средстве отслеживания PHD, если вес компонента ниже, чем значение, заданное свойством DeletionThreshold, удален компонент.
Пример: 0.01
Типы данных: single | double
MergingThreshold — Порог для слияния компонентов25 (значение по умолчанию) | действительная положительная скалярная величина Порог для слияния компонентов, заданного как действительная положительная скалярная величина. В средстве отслеживания PHD, если расстояние Kullback-Leibler между компонентами с тем же TrackID меньше, чем значение, заданное свойством MergingThreshold, то эти компоненты объединены на один компонент. Объединенный вес нового компонента равен суммированию весов предварительно объединенных компонентов. Кроме того, если объединенный вес выше, чем первый порог, заданный в свойстве LabelingThresholds, объединенный вес является усеченным к первому порогу. Обратите внимание на то, что компоненты с TrackID, равным 0, могут также быть объединены друг с другом.
Пример: 30
Типы данных: single | double
LabelingThresholds — Пороги для управления меткой[1.1 1 0.8] (значение по умолчанию) | 1 3 вектор положительных значенийМаркировка порогов, заданных как 1 3 вектор уменьшения положительных значений, [C 1, C 2, C 3]. На основе свойства LabelingThresholds средство отслеживания управляет компонентами в плотности, использующей эти правила:
Вес любого компонента, который выше, чем первый порог C 1, уменьшается до C 1.
Для всех компонентов с тем же TrackID, если самый большой вес среди этих компонентов больше, чем C 2, то компонент с самым большим весом сохраняется, чтобы сохранить TrackID, в то время как все другие компоненты удалены.
Для всех компонентов с тем же TrackID, если отношение самого большого веса к суммированию веса всех этих компонентов больше, чем C 3, то компонент с самым большим весом сохраняется, чтобы сохранить TrackID, в то время как все другие компоненты удалены.
Если ни условие 2, ни условие 3 не удовлетворены, то компонент с самым большим весом сохраняет TrackID, в то время как метки всех других компонентов установлены в 0. Когда это происходит, это по существу означает, что некоторые компоненты могут представлять другие объекты. Эта обработка сохраняет возможность для этих незарезервированных компонентов, которые будут извлечены снова в будущем.
Типы данных: single | double
HasSensorConfigurationsInput — Позвольте обновить настройки датчика со временемfalse (значение по умолчанию) | trueПозвольте обновить настройки датчика со временем, заданным как false или true. Установите это свойство на true, если вы хотите настройки датчика, обновленного со временем. Кроме того, когда это свойство установлено в true, средство отслеживания должно быть вызвано входом настройки, config, как показано в синтаксисе использования.
Типы данных: логический
NumTracks — Количество дорожек сохраняется средством отслеживанияЭто свойство доступно только для чтения.
Количество дорожек сохраняется средством отслеживания, возвращенным как неотрицательное целое число.
Типы данных: double
NumConfirmedTracks — Количество подтвержденных дорожекЭто свойство доступно только для чтения.
Количество подтвержденных дорожек, возвращенных как неотрицательное целое число. Если полем IsConfirmed выходной структуры дорожки является true, дорожка подтверждена.
Типы данных: double
MaxNumSensors — Максимальное количество датчиков20 (значение по умолчанию) | положительное целое числоМаксимальное количество датчиков, которые могут быть соединены со средством отслеживания, задало как положительное целое число. MaxNumSensors должен быть больше, чем или равным самому большому значению SensorIndex, найденного во всех обнаружениях, используемых, чтобы обновить средство отслеживания. SensorIndex является свойством объекта objectDetection.
Типы данных: single | double
MaxNumTracks — Максимальное количество дорожек100 (значение по умолчанию) | положительное целое числоМаксимальное количество дорожек, которые средство отслеживания может поддержать, заданный как положительное целое число.
Типы данных: single | double
Чтобы обработать обнаружения и дорожки обновления, вызовите средство отслеживания с аргументами, как будто это была функция (описанный здесь).
confirmedTracks = tracker(detections,time)confirmedTracks = tracker(detections,config,time)[confirmedTracks,tentativeTracks,allTracks] = tracker(___)[confirmedTracks,tentativeTracks,allTracks,analysisInformation] = tracker(___)confirmedTracks = tracker(detections,time)detections, во время обновления, time. Подтвержденные дорожки исправлены и предсказаны ко времени обновления.
confirmedTracks = tracker(detections,config,time)config. Используйте этот синтаксис, когда настройки датчиков изменятся со временем. Чтобы включить этот синтаксис, установите свойство HasSensorConfigurationsInput на true.
[ также возвращает список предварительных дорожек, confirmedTracks,tentativeTracks,allTracks] = tracker(___)tentativeTracks и списка всех дорожек, allTracks. Можно использовать этот выходной синтаксис с любым из предыдущих входных синтаксисов.
[ также возвращает информацию об анализе, confirmedTracks,tentativeTracks,allTracks,analysisInformation] = tracker(___)analysisInformation, который может использоваться для анализа дорожки. Можно использовать этот выходной синтаксис с любым из предыдущих входных синтаксисов.
Чтобы использовать объектную функцию, задайте Системный объект как первый входной параметр. Например, чтобы выпустить системные ресурсы Системного объекта под названием obj, используйте этот синтаксис:
release(obj)
Настройте настройку датчика, создайте средство отслеживания PHD и питайте средство отслеживания обнаружениями.
% Create sensor configuration. Specify clutter density of the sensor and % set the IsValidTime property to true. configuration = trackingSensorConfiguration(1); configuration.ClutterDensity = 1e-7; configuration.IsValidTime = true; % Create a PHD tracker. tracker = trackerPHD('SensorConfigurations',configuration); % Create detections near points [5;-5;0] and [-5;5;0] at t=0, and % update the tracker with these detections. detections = cell(20,1); for i = 1:10 detections{i} = objectDetection(0,[5;-5;0] + 0.2*randn(3,1)); end for j = 11:20 detections{j} = objectDetection(0,[-5;5;0] + 0.2*randn(3,1)); end tracker(detections,0);
Обновите средство отслеживания снова после 0,1 секунд путем предположения, что цели перемещаются в постоянную скорость [1; 2; 0] модуль в секунду.
dT = 0.1;
for i = 1:20
detections{i}.Time = detections{i}.Time + dT;
detections{i}.Measurement = detections{i}.Measurement + [1;2;0]*dT;
end
[confTracks,tentTracks,allTracks] = tracker(detections,dT);
Визуализируйте обнаружения и подтвержденные дорожки.
% Obtain measurements from detections. d = [detections{:}]; measurements = [d.Measurement]; % Extract positions of confirmed tracking using getTrackPositions function. % Note that we used the default sensor configuration % FilterInitializationFcn, initcvggiwphd, which uses a constant velocity % model and defines the states as [x;vx;y;vy;z;vy]. positionSelector = [1 0 0 0 0 0;0 0 1 0 0 0;0 0 0 0 1 0]; positions = getTrackPositions(confTracks,positionSelector); figure() plot(measurements(1,:),measurements(2,:),'x','MarkerSize',5,'MarkerEdgeColor','b'); hold on; plot(positions(1,1),positions(1,2),'v','MarkerSize',5,'MarkerEdgeColor','r' ); hold on; plot(positions(2,1),positions(2,2),'^','MarkerSize',5,'MarkerEdgeColor','r' ); legend('Detections','Track 1','Track 2') xlabel('x') ylabel('y')
![]()
Плотность гипотезы вероятности (PHD) является функцией, определяемой по пространству состояний системы слежения, и ее значение в состоянии задано как ожидаемое количество целей на модульный объем пространства состояний. PHD обычно аппроксимируется смесью компонентов, и каждый компонент соответствует оценке состояния. Обычно используемые приближения PHD являются Гауссовой смесью, смесью SMC, смесью GGIW и смесью GIW. В настоящее время trackerPHD реализует представление смеси GGIW ggiwphd, который может использоваться, чтобы отследить расширенные объекты.
Чтобы понять PHD, возьмите Гауссову смесь в качестве примера. Гауссова смесь может быть представлена
![]()
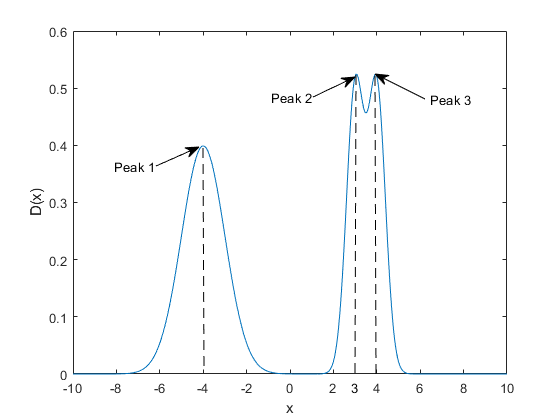
где M является общим количеством компонентов, N (x |mi, P i) является нормальным распределением со средним m i и ковариация P i, и w, i - вес i th компонент. w веса i обозначает номер (может быть дробным) целей, представленных i th компонент. Интегрирование D (x) по области пространства состояний приводит к ожидаемому количеству целей в той области. При интеграции D (x) по целым результатам пространства состояний в общем ожидаемом количестве целей (∑ w i), поскольку интегрирование нормального распределения по целому пространству состояний равняется 1. Координаты x peaks (локальные максимумы) D (x) представляют наиболее вероятные состояния целей.
Например, следующая фигура иллюстрирует функцию PHD, данную D (x) = N (x |−4,2) + 0.5N (x |3 0.4) + 0.5N (x |4 0.4). Суммирование веса этих компонентов равняется 2, что означает, что, вероятно, существуют 2 цели. От peaks D (x) возможные положения этих целей в x = −4, x = 3, и x = 4. Заметьте, что последние два компонента очень друг близко к другу, что означает, что эти два компонента могут возможно быть приписаны одному объекту.
[1] Granstorm, K., К. Ландкуист и О. Оргунер. "Расширенное целевое отслеживание с помощью фильтра Gaussian-mixture PHD". Транзакции IEEE на Космических и Электронных системах. Издание 48, Номер 4, 2012, стр 3268-3286.
[2] Granstorm, K. и О. Оргунер". Фильтр PHD для отслеживания нескольких расширенных целей с помощью случайных матриц". Транзакции IEEE на Обработке сигналов. Издание 60, Номер 11, 2012, стр 5657-5671.
[3] Granstorm, K., и А. Натале, П. Брэка, Г. Лудено и Ф. Серафино. "Гамма Гауссова инверсия плотность гипотезы вероятности Уишарта для расширенной целевой X-полосы использования отслеживания морские радарные данные". Транзакции IEEE на Геонауке и Дистанционном зондировании. Издание 53, Номер 12, 2015, стр 6617-6631.
