График корневого локуса динамической системы
rlocus( вычисляет и отображает корневой локус модели SISO sys)sys. Корневой локус возвращает траектории полюсов с замкнутым контуром как функцию коэффициента усиления обратной связи k (предполагая отрицательную обратную связь). Корневые локусы используются для изучения влияния различных коэффициентов усиления обратной связи на положения полюсов с замкнутым контуром. В свою очередь, эти местоположения предоставляют косвенную информацию о временных и частотных откликах.
Вы можете использовать rlocus для построения диаграммы корневого локуса любого из следующих контуров отрицательной обратной связи путем установки sys как показано ниже:
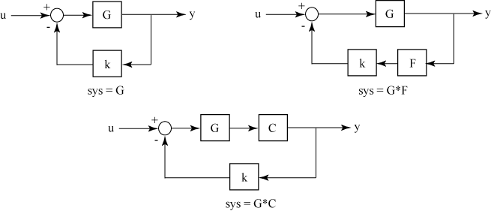
Например, если sys - передаточная функция, представленная
d (s)
полюса с замкнутым контуром являются корнями
s) = 0
График корневого локуса изображает траектории полюсов с замкнутым контуром, когда коэффициент усиления обратной связи k изменяется от 0 до бесконечности. rlocus адаптивно выбирает набор положительных выигрышей k для создания гладкого графика. Полюса на графике локуса корня обозначаются x и нули обозначаются как o.
rlocus(sys1,sys2,...) строит графики корневых локусов нескольких моделей LTI sys1, sys2,... на одном участке. Для каждой модели можно задать цвет, стиль линий и маркер. Дополнительные параметры настройки печати см. в разделе rlocusplot.
Для этого примера. постройте график корневого местоположения следующей динамической системы SISO:
1s2 + 2s + 3.
sys = tf([2 5 1],[1 2 3]); rlocus(sys)

Полюса системы обозначаются x, в то время как нули обозначаются o на графике локуса корня. Для добавления линий сетки, увеличения или уменьшения масштаба, а также для настройки графика можно вызвать редактор свойств.
Для получения дополнительных параметров настройки печати используйте rlocusplot.
В этом примере рассмотрим sisoModels.mat который содержит следующие три модели SISO:
sys1 модель передаточной функции
sys2 модель состояния-пространства
sys3 модель с нулевым усилением полюсов
Загрузить модели из mat файл.
load('sisoModels.mat','sys1','sys2','sys3');
Создание графика корневого локуса с помощью rlocus и укажите цвет для каждой системы. Также добавьте легенду на график корневого локуса.
rlocus(sys1,'b',sys2,'k',sys3,'r') hold on legend('sys1','sys2','sys3') hold off

Рисунок содержит диаграммы корневых локусов для всех трех систем на одном графике. Дополнительные сведения о настройке печати см. в разделе rlocusplot.
В этом примере рассмотрим следующую модель передаточной функции SISO:
7s2 + 5s + 6
Используйте приведенную выше модель передаточной функции с rlocus для извлечения полюсов с замкнутым контуром и соответствующих значений коэффициента усиления обратной связи.
sys = tf([3 1],[9 7 5 6]); [r,k] = rlocus(sys)
r = 3×53 complex
-0.9406 + 0.0000i -0.8744 + 0.0000i -0.8685 + 0.0000i -0.8620 + 0.0000i -0.8550 + 0.0000i -0.8475 + 0.0000i -0.8394 + 0.0000i -0.8306 + 0.0000i -0.8212 + 0.0000i -0.8111 + 0.0000i -0.8003 + 0.0000i -0.7888 + 0.0000i -0.7766 + 0.0000i -0.7636 + 0.0000i -0.7500 + 0.0000i -0.7358 + 0.0000i -0.7209 + 0.0000i -0.7055 + 0.0000i -0.6896 + 0.0000i -0.6734 + 0.0000i -0.6569 + 0.0000i -0.6402 + 0.0000i -0.6236 + 0.0000i -0.6071 + 0.0000i -0.5908 + 0.0000i -0.5748 + 0.0000i -0.5593 + 0.0000i -0.5443 + 0.0000i -0.5299 + 0.0000i -0.5161 + 0.0000i -0.5030 + 0.0000i -0.4906 + 0.0000i -0.4789 + 0.0000i -0.4679 + 0.0000i -0.4576 + 0.0000i -0.4480 + 0.0000i -0.4390 + 0.0000i -0.4306 + 0.0000i -0.4229 + 0.0000i -0.4157 + 0.0000i -0.4090 + 0.0000i -0.4029 + 0.0000i -0.3972 + 0.0000i -0.3919 + 0.0000i -0.3871 + 0.0000i -0.3826 + 0.0000i -0.3785 + 0.0000i -0.3748 + 0.0000i -0.3713 + 0.0000i -0.3681 + 0.0000i
0.0814 + 0.8379i 0.0483 + 0.9140i 0.0453 + 0.9212i 0.0421 + 0.9291i 0.0386 + 0.9377i 0.0349 + 0.9470i 0.0308 + 0.9573i 0.0264 + 0.9686i 0.0217 + 0.9809i 0.0167 + 0.9943i 0.0113 + 1.0090i 0.0055 + 1.0251i -0.0006 + 1.0426i -0.0071 + 1.0617i -0.0139 + 1.0826i -0.0210 + 1.1053i -0.0284 + 1.1300i -0.0362 + 1.1568i -0.0441 + 1.1859i -0.0522 + 1.2175i -0.0605 + 1.2515i -0.0688 + 1.2883i -0.0771 + 1.3278i -0.0853 + 1.3703i -0.0935 + 1.4158i -0.1015 + 1.4644i -0.1092 + 1.5162i -0.1167 + 1.5714i -0.1239 + 1.6299i -0.1308 + 1.6920i -0.1374 + 1.7578i -0.1436 + 1.8273i -0.1494 + 1.9006i -0.1549 + 1.9780i -0.1601 + 2.0594i -0.1649 + 2.1452i -0.1694 + 2.2354i -0.1736 + 2.3302i -0.1775 + 2.4299i -0.1810 + 2.5345i -0.1844 + 2.6442i -0.1875 + 2.7594i -0.1903 + 2.8802i -0.1929 + 3.0069i -0.1953 + 3.1397i -0.1976 + 3.2789i -0.1996 + 3.4247i -0.2015 + 3.5775i -0.2032 + 3.7375i -0.2048 + 3.9052i
0.0814 - 0.8379i 0.0483 - 0.9140i 0.0453 - 0.9212i 0.0421 - 0.9291i 0.0386 - 0.9377i 0.0349 - 0.9470i 0.0308 - 0.9573i 0.0264 - 0.9686i 0.0217 - 0.9809i 0.0167 - 0.9943i 0.0113 - 1.0090i 0.0055 - 1.0251i -0.0006 - 1.0426i -0.0071 - 1.0617i -0.0139 - 1.0826i -0.0210 - 1.1053i -0.0284 - 1.1300i -0.0362 - 1.1568i -0.0441 - 1.1859i -0.0522 - 1.2175i -0.0605 - 1.2515i -0.0688 - 1.2883i -0.0771 - 1.3278i -0.0853 - 1.3703i -0.0935 - 1.4158i -0.1015 - 1.4644i -0.1092 - 1.5162i -0.1167 - 1.5714i -0.1239 - 1.6299i -0.1308 - 1.6920i -0.1374 - 1.7578i -0.1436 - 1.8273i -0.1494 - 1.9006i -0.1549 - 1.9780i -0.1601 - 2.0594i -0.1649 - 2.1452i -0.1694 - 2.2354i -0.1736 - 2.3302i -0.1775 - 2.4299i -0.1810 - 2.5345i -0.1844 - 2.6442i -0.1875 - 2.7594i -0.1903 - 2.8802i -0.1929 - 3.0069i -0.1953 - 3.1397i -0.1976 - 3.2789i -0.1996 - 3.4247i -0.2015 - 3.5775i -0.2032 - 3.7375i -0.2048 - 3.9052i
k = 1×53
104 ×
0 0.0001 0.0001 0.0001 0.0001 0.0001 0.0001 0.0001 0.0001 0.0001 0.0001 0.0001 0.0002 0.0002 0.0002 0.0002 0.0002 0.0003 0.0003 0.0003 0.0003 0.0004 0.0004 0.0004 0.0005 0.0005 0.0006 0.0006 0.0007 0.0007 0.0008 0.0009 0.0010 0.0011 0.0012 0.0013 0.0014 0.0015 0.0017 0.0018 0.0020 0.0022 0.0024 0.0026 0.0028 0.0031 0.0034 0.0037 0.0041 0.0045
С тех пор sys содержит 3 полюса, размер результирующего массива полюсов r 3x53. Каждый столбец в r соответствует значению коэффициента усиления от вектора k. Для этого примера: rlocus автоматически выбрал 53 значения k от нуля до бесконечности, чтобы получить гладкую траекторию для трех полюсов с замкнутым контуром.
display(r(:,39))
-0.4229 + 0.0000i -0.1775 + 2.4299i -0.1775 - 2.4299i
display(k(39))
16.5907
Например, r(:,39) содержит вышеупомянутые полюса замкнутого контура для значения коэффициента усиления обратной связи 16.5907.
В этом примере рассмотрим следующую модель передаточной функции SISO:
3s2 + 2
Определите модель передаточной функции и требуемый вектор значений коэффициента усиления обратной связи. Для этого примера рассмотрим набор значений усиления, изменяющихся от 1 до 8 с приращениями 0,5, и извлеките положения полюсов с замкнутым контуром, используя rlocus.
sys = tf([0.5 -1],[4 0 3 0 2]); k = (1:0.5:5); r = rlocus(sys,k); size(r)
ans = 1×2
4 9
С тех пор sys содержит 4 полюса замкнутого контура, размер результирующего массива местоположений замкнутого полюса r равно 4x9, где 9 столбцов соответствуют 9 конкретным значениям усиления, определенным в k.
Можно также визуализировать траекторию полюсов замкнутого контура для определенных значений коэффициента усиления в k на графике локуса корня.
rlocus(sys,k)

Интерактивный подход к построению корневого локуса см. в разделе Конструктор систем управления.
Конструктор системы управления | pole | rlocusplot | ss | tf | zero | zpk
