Настраиваемые обобщенные модели LTI представляют системы, имеющие как фиксированные, так и настраиваемые (или параметрические) коэффициенты.
Настраиваемые обобщенные модели LTI можно использовать для:
Моделирование настраиваемого (или параметрического) компонента системы управления, например настраиваемого фильтра нижних частот.
Смоделировать систему управления, которая содержит оба:
Фиксированные компоненты, такие как динамика завода и динамика датчиков
Перестраиваемые компоненты, такие как фильтры и компенсаторы
Для проработки параметров можно использовать настраиваемые обобщенные модели LTI. Пример см. в разделе Изменение параметров исследования с помощью выборки настраиваемой модели. Можно также использовать настраиваемые обобщенные модели LTI для настройки фиксированных структур управления с помощью таких команд настройки, как systune или приложение «Настройка системы управления» См. Многолучевую многообъективную настройку.
Система управления Toolbox™ включает перестраиваемые компоненты с предопределенной структурой, называемой блоками проектирования элементов управления. Настраиваемые управляющие блоки проектирования можно использовать для моделирования любого настраиваемого компонента, который подходит для одной из стандартных структур.
Чтобы создать настраиваемые компоненты с определенной пользовательской структурой, не охваченной блоками проектирования элементов управления:
Использовать настраиваемый вещественный параметр realp или обобщенная матрица genmat для представления настраиваемых коэффициентов компонента.
Использовать результирующий realp или genmat объекты в качестве входных данных для tf или ss для моделирования компонента. Результатом является обобщённое состояние-пространство (genss) модель компонента.
Примеры создания таких настраиваемых компонентов см. в:
Для построения настраиваемой обобщенной модели LTI, представляющей систему управления с фиксированными и настраиваемыми компонентами:
Моделирование неперестраиваемых компонентов системы с использованием цифровых моделей LTI.
Моделирование каждого настраиваемого компонента с использованием управляющих блоков проектирования или выражений, включающих такие блоки. См. раздел Моделирование перестраиваемых компонентов.
Используйте команды взаимодействия модели, такие как series, parallel или connectили арифметические операторы +, -, *, /, \, и ^, для объединения всех компонентов системы.
Результирующая модель:
A genss модель, если ни один из неперестраиваемых компонентов не является моделью данных частотного отклика (например, frd)
A genfrd модель, если неперестраиваемый компонент является frd модель
Пример построения genss модель системы управления с фиксированными и настраиваемыми компонентами см. в разделе Система управления с настраиваемыми компонентами.
Обобщенная модель отдельно сохраняет числовую и параметрическую части модели путем структурирования модели в стандартной форме, как показано на следующей иллюстрации.
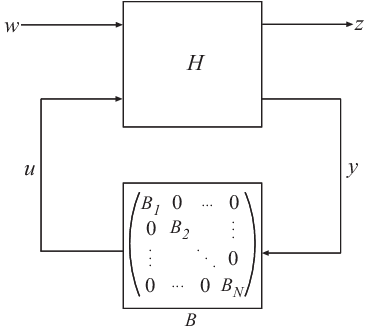
w и z представляют входы и выходы обобщенной модели.
H представляет все части обобщенной модели, которые имеют фиксированные (непараметрические) коэффициенты. H представляет собой:
Область состояния (ss) модель, для genss модели
Данные частотной характеристики (frd) модель, для genfrd модели
Матрица, для genmat модели
B представляет параметрические компоненты модели Generalized, которые являются Блоками Дизайна Контроля B1 . , МИЛЛИАРД. Blocks свойство Обобщенной модели хранит список имен этих блоков. Если обобщенная модель имеет блоки, которые встречаются несколько раз в B1, .. , BN, они перечислены только один раз в Blocks собственность.
Доступ к внутреннему представлению обобщенной модели, включая H и B, используйте getLFTModel команда.
Эта стандартная форма может представлять любую структуру управления. Чтобы понять, почему, рассмотрим структуру управления как агрегацию элементов с фиксированным коэффициентом, взаимодействующих с параметрическими элементами:
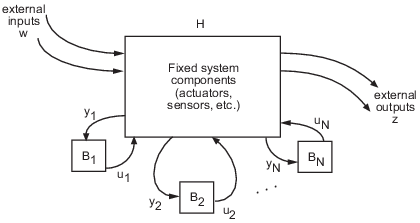
Чтобы переписать его в стандартной форме, определите
y1,..., yN],
и группируют перестраиваемые элементы управления B1, . , BN в блок-диагональную конфигурацию C. P включает в себя все фиксированные компоненты архитектуры управления - исполнительные механизмы, датчики и другие неперестраиваемые элементы - и их взаимосвязи.
