В Automated Driving Toolbox™ можно получать данные датчиков высокой точности из виртуальной среды. Эта среда визуализируется с помощью Unreal Engine ® от Epic Games ®.
В таблице представлены блоки датчиков, которые можно моделировать в этой среде.
| Блок датчиков | Описание | Визуализация | Пример |
|---|---|---|---|
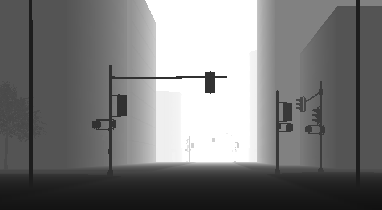
| Отображение изображений с камеры с помощью блока Video Viewer или To Video Display. Пример визуализации:
| ||
Отображение карт глубины с помощью блока Video Viewer или To Video Display. Пример визуализации:
| |||
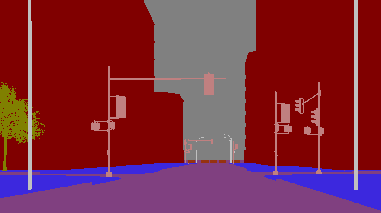
Отображение семантических карт сегментации с помощью блока Video Viewer или To Video Display. Пример визуализации:
| |||
| Отображение изображений с камеры с помощью блока Video Viewer или To Video Display. Пример визуализации:
| Моделирование простого сценария вождения и датчика в среде нереального двигателя | |
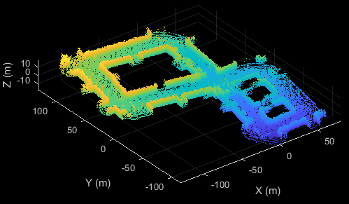
| Отображение данных облака точек с помощью
| Разработка алгоритма Lidar SLAM с использованием среды моделирования нереального двигателя | |
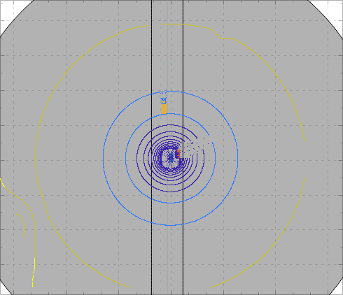
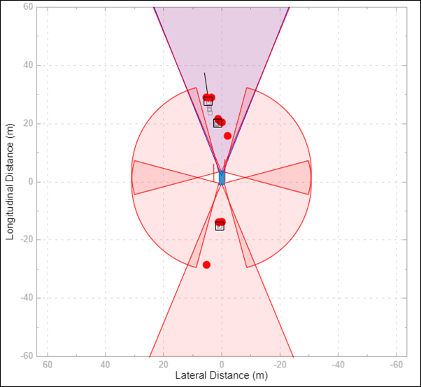
Отображение зон покрытия лидара и обнаружений с помощью области «Птичий глаз». Пример визуализации:
| Визуализация данных датчиков из среды моделирования нереального двигателя | ||
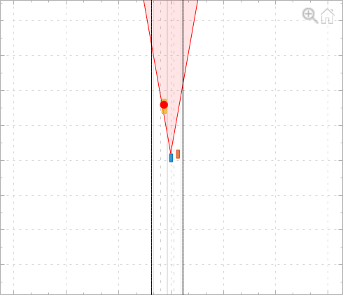
| Отображение зон действия радаров и обнаружений с помощью области действия «Птичий глаз». Пример визуализации:
| Моделирование датчиков зрения и радаров в нереальной среде двигателя Визуализация данных датчиков из среды моделирования нереального двигателя | |
| Генератор моделирования 3D обнаружения видения |
| Отображение зон видимости и обнаружений с помощью области «Птичий глаз». Пример визуализации:
| Моделирование датчиков зрения и радаров в нереальной среде двигателя |