Обнаружение объектов и полос движения по результатам измерений в среде моделирования 3D
Автоматизированная панель инструментов вождения/ 3D моделирования
Блок генератора имитационного 3D визуального обнаружения генерирует сигналы обнаружения из измерений камеры, производимых датчиком зрения, установленным на эго-транспортном средстве в среде 3D моделирования. Эта среда визуализируется с помощью Unreal Engine ® от Epic Games ®. Блок извлекает обнаружения из моделируемых позиций актера, которые основаны на кубоидных (коробчатых) представлениях актёров в сценарии. Дополнительные сведения см. в разделе Алгоритмы.
Блок генерирует обнаружения с интервалами, равными интервалу обновления датчика. Обнаружения привязываются к системе координат датчика. Блок может моделировать реальные обнаружения, которые добавили случайный шум, а также генерировать ложные положительные обнаружения. Статистическая модель генерирует шум измерения, истинные обнаружения и ложные срабатывания. Для управления случайными числами, генерируемыми статистической моделью, используйте настройки генератора случайных чисел на вкладке «Измерения» блока.
Если для параметра Sample time установлено значение -1блок использует время выборки, указанное в блоке «Моделирование» 3D «Конфигурация сцены». Чтобы использовать этот датчик, необходимо включить в модель блок «Моделирование» 3D «Конфигурация сцены».
Примечание
Блок Simulation 3D Scene Configuration должен выполняться перед блоком Simulation 3D Vision Detection Generator. Таким образом, среда визуализации Unreal Engine 3D подготавливает данные до того, как блок генератора моделирования 3D обнаружения видения получит их. Чтобы проверить порядок выполнения блока, щелкните его правой кнопкой мыши и выберите «Свойства». На вкладке Общие подтвердите следующие параметры приоритета:
Моделирование 3D Конфигурация сцены - 0
Генератор моделирования 3D визуального обнаружения - 1
Дополнительные сведения о порядке выполнения см. в разделе Как работает моделирование нереального двигателя для автоматического вождения.
Блок Simulation 3D Vision Detection Generator не обнаруживает полосы в виртуальной сцене Mcity.
Sensor identifier - Уникальный идентификатор датчика1 (по умолчанию) | положительное целое числоУникальный идентификатор датчика, указанный как положительное целое число. В мультисенсорной системе идентификатор датчика различает датчики. При добавлении нового блока датчика в модель идентификатор датчика этого блока будет N + 1. N - наибольшее значение идентификатора датчика среди существующих блоков датчиков в модели.
Пример: 2
Parent name - Наименование родителя, на котором установлен датчикScene Origin (по умолчанию) | название транспортного средстваИмя родителя, к которому подключен датчик, указанное как Scene Origin или как название транспортного средства в модели. Имена транспортных средств, которые можно выбрать, соответствуют параметрам «Имя» (Name) блока «Моделирование транспортного средства» (Simulation) 3D «Транспортное Средство» (Vehicle) с блоками «Следование по земле» (Ground Foll При выборе Scene Originблок размещает датчик в начале сцены.
Пример: SimulinkVehicle1
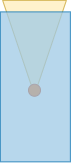
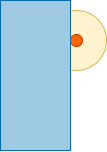
Mounting location - Место установки датчикаOrigin (по умолчанию) | Front bumper | Rear bumper | Right mirror | Left mirror | Rearview mirror | Hood center | Roof centerМесто установки датчика.
Когда имя родителя равно Scene Originблок устанавливает датчик в начало сцены. Расположение монтажа можно установить равным Origin только. Во время моделирования датчик остается неподвижным.
Если Parent name - имя транспортного средства (например, SimulinkVehicle1) блок устанавливает датчик в одно из предварительно определенных мест установки, описанных в таблице. Во время моделирования датчик перемещается вместе с транспортным средством.
| Место установки транспортного средства | Описание | Ориентация относительно начала координат транспортного средства [крен, шаг, рыскание] (град.) |
|---|---|---|
Origin | Датчик, установленный на начало координат транспортного средства, находящегося на земле, в геометрическом центре транспортного средства (см. «Системы координат для имитации нереального двигателя в автоматизированной панели инструментов вождения»)
| [0, 0, 0] |
Front bumper | Датчик, установленный на переднем бампере
| [0, 0, 0] |
Rear bumper | Датчик, обращенный назад, установленный на заднем бампере
| [0, 0, 180] |
Right mirror | Датчик, обращенный вниз, установленный на правом зеркале бокового обзора
| [0, –90, 0] |
Left mirror | Обращенный вниз датчик, установленный на левом зеркале бокового обзора
| [0, –90, 0] |
Rearview mirror | Датчик, обращенный вперед, установленный на зеркале заднего вида внутри транспортного средства
| [0, 0, 0] |
Hood center | Датчик, установленный в центре капота
| [0, 0, 0] |
Roof center | Датчик, обращенный вперед, установленный в центре крыши
| [0, 0, 0] |
Крен, шаг и рыскание являются положительными по часовой стрелке, если смотреть в положительном направлении по осям X, Y и Z соответственно. При взгляде на транспортное средство сверху вниз угол рыскания (то есть угол ориентации) против часовой стрелки-положительный, потому что вы смотрите в отрицательном направлении оси.
Расположение (X, Y, Z) датчика относительно транспортного средства зависит от типа транспортного средства. Чтобы указать тип транспортного средства, используйте параметр Тип (Type) блока Имитация транспортного средства со следом за землей (Simulation 3D Vehicle with Ground Following), к которому монтируется датчик. Для получения информации о местах установки (X, Y, Z) для типа транспортного средства см. справочную страницу для данного транспортного средства.
Чтобы определить местоположение датчика в мировых координатах, откройте блок датчика. Затем на вкладке Ground Truth выберите Output location (m) and orientation (rad) и проверьте данные из выходного порта Location.
Specify offset - Указать смещение от места монтажаoff (по умолчанию) | onВыберите этот параметр, чтобы задать смещение от места монтажа с помощью параметров относительного перемещения [X, Y, Z] (m) и относительного поворота [Roll, Pitch, Yaw] (o).
Relative translation [X, Y, Z] (m) - Смещение перемещения относительно места монтажа[0, 0, 0] (по умолчанию) | действительный вектор 1 на 3Смещение перемещения относительно места установки датчика, определяемое как действительный вектор 1 на 3 вида [X, Y, Z]. Единицы в метрах.
Если установить датчик на транспортное средство, установив для параметра Имя родителя (Parent name) имя этого транспортного средства, то X, Y и Z находятся в системе координат транспортного средства, где:
Ось X указывает вперед от транспортного средства.
Ось Y указывает влево от транспортного средства, если смотреть в направлении вперед.
Ось Z указывает вверх.
Исходная точка - это место установки, указанное в параметре Место установки. Эта точка отсчета отличается от точки отсчета транспортного средства, которая является геометрическим центром транспортного средства.
Если установить датчик в начало координат сцены, установив для параметра «Родительское имя» значение Scene Originзатем X, Y и Z находятся в мировых координатах сцены.
Дополнительные сведения о системах координат транспортного средства и мира см. в разделе Системы координат для моделирования нереального двигателя в автоматизированной панели инструментов вождения.
Пример: [0,0,0.01]
Чтобы включить этот параметр, выберите Задать смещение (Specify offset).
Relative rotation [Roll, Pitch, Yaw] (deg) - Угловое смещение относительно места установки[0, 0, 0] (по умолчанию) | действительный вектор 1 на 3Смещение вращения относительно места установки датчика, определяемое как действительный вектор 1 на 3 формы [Roll, Pitch, Yaw]. Крен, шаг и рыскание - это углы поворота вокруг осей X, Y и Z. Единицы измерения в градусах.
Если установить датчик на транспортное средство, установив для параметра Имя родителя (Parent name) имя этого транспортного средства, то X, Y и Z находятся в системе координат транспортного средства, где:
Ось X указывает вперед от транспортного средства.
Ось Y указывает влево от транспортного средства, если смотреть в направлении вперед.
Ось Z указывает вверх.
Крен, шаг и рыскание являются положительными по часовой стрелке при взгляде в направлении вперед по осям X, Y и Z соответственно. При просмотре сцены с 2D перспективы сверху вниз угол рыскания (также называемый углом ориентации) является положительным против часовой стрелки, так как вы просматриваете сцену в отрицательном направлении оси Z.
Исходная точка - это место установки, указанное в параметре Место установки. Эта точка отсчета отличается от точки отсчета транспортного средства, которая является геометрическим центром транспортного средства.
Если установить датчик в начало координат сцены, установив для параметра «Родительское имя» значение Scene Originзатем X, Y и Z находятся в мировых координатах сцены.
Дополнительные сведения о системах координат транспортного средства и мира см. в разделе Системы координат для моделирования нереального двигателя в автоматизированной панели инструментов вождения.
Пример: [0,0,10]
Чтобы включить этот параметр, выберите Задать смещение (Specify offset).
Sample time - Время выборки-1 (по умолчанию) | положительный скалярВремя выборки блока в секундах, указанное как положительный скаляр. Частота кадров среды моделирования 3D является обратной времени выборки.
Если задать время выборки равным -1блок наследует время выборки из блока «Моделирование» 3D «Конфигурация сцены».
Types of detections generated by sensor - Типы обнаружений, генерируемых датчикомLanes and objects (по умолчанию) | Objects only | Lanes only | Lanes with occlusionТипы обнаружений, генерируемых датчиком, указанные как одна из следующих опций:
Lanes and objects - Обнаружение полос движения и объектов. Никакая дорожная информация не используется для окклюдирования субъектов.
Objects only - Обнаружение только объектов.
Lanes only - Только полосы обнаружения.
Lanes with occlusion - Обнаружение полосы движения и объектов. Объекты в поле зрения камеры могут ухудшать способность датчика обнаруживать полосы движения.
Maximum number of reported detections - Максимальное количество зарегистрированных обнаружений50 (по умолчанию) | положительное целое числоМаксимальное число обнаружений, указанное датчиком как положительное целое число. Сообщения об обнаружениях поступают в порядке увеличения расстояния от датчика до достижения максимального числа.
Пример: 100
Maximum number of reported lanes - Максимальное количество сообщаемых полос движения30 (по умолчанию) | положительное целое числоМаксимальное количество полос, указанных как положительное целое число.
Пример: 100
Distance from parent for computing lane boundaries - Расстояния от родительского кадра для вычисления границ полосы движения0:0.5:9.5 (по умолчанию) | N-элементный действительный векторРасстояния от родительского кадра, на котором вычисляются границы полосы движения, определяемые как N-элементный действительный вектор. N - количество значений расстояния. N не должно превышать 100. Единицы в метрах.
Родительским элементом является рама, на которой установлен датчик, например эго-транспортное средство. Родительский кадр определяется параметром Parent name. Расстояния зависят от начала координат родительского кадра.
При обнаружении полос движения по обращенным назад камерам укажите отрицательные расстояния. При обнаружении полос движения от фронтальных камер укажите положительные расстояния.
По умолчанию блок вычисляет границу полосы каждые 0,5 метра в диапазоне от 0 до 9,5 метров перед родительским элементом.
Пример: 1:0.1:10 вычисляет границу полосы каждые 0,1 метра в диапазоне от 1 до 10 метров перед родительским объектом.
Source of object bus name - Источник имени шины объектаAuto (по умолчанию) | PropertyИсточник имени шины объекта, указанный как Auto или Property. При выборе Auto, блок создает имя шины. При выборе Propertyукажите имя шины с помощью параметра Object bus name.
Object bus name - Имя шины объектаBusObjectDetections | допустимое имя шиныИмя шины объекта, указанное как допустимое имя шины.
Чтобы включить этот параметр, установите для параметра Source of object bus name значение Property.
Source of output lane bus name - Наименование шины выходной полосыAuto (по умолчанию) | PropertyНаименование шины выходной полосы, указанное как Auto или Property. При выборе Auto, блок создает имя шины. При выборе Propertyукажите имя шины с помощью параметра «Указать имя шины выходной полосы движения».
Specify an output lane bus name - Название автобуса переулкаBusLaneDetections (по умолчанию) | допустимое имя шиныИмя шины полосы движения, указанное как допустимое имя шины.
Для включения этого параметра установите для параметра Source of output lane bus name значение Property.
Maximum detection range (m) - Максимальный диапазон обнаружения150 (по умолчанию) | положительный вещественный скалярМаксимальный диапазон обнаружения, заданный как положительный действительный скаляр. Датчик зрения не может обнаруживать объекты за пределами этого диапазона. Единицы в метрах.
Пример: 250
Bounding box accuracy (pixels) - Точность ограничивающей рамки5 (по умолчанию) | положительный вещественный скалярТочность ограничивающей рамки, заданная как положительный действительный скаляр. Эта величина определяет точность, с которой детектор может сопоставить ограничительную рамку с целью. Единицы измерения выражены в пикселях.
Пример: 9
Smoothing filter noise intensity (m/s^2) - Интенсивность шума, используемого для измерения положения и скорости фильтрации5 (по умолчанию) | положительный вещественный скалярИнтенсивность шума, используемая для измерения положения и скорости фильтрации, заданная как положительный действительный скаляр. Интенсивность шума определяет стандартное отклонение технологического шума внутреннего фильтра Калмана с постоянной скоростью, используемого в датчике зрения. Фильтр моделирует шум процесса с использованием кусочно-постоянной модели ускорения белого шума. Интенсивность шума обычно составляет порядок максимальной величины ускорения, ожидаемой для цели. Единицы в метрах в секунду в квадрате.
Пример: 2
Maximum detectable object speed (m/s) - Максимальная скорость обнаруживаемого объекта50 (по умолчанию) | неотрицательный вещественный скалярМаксимальная скорость обнаруживаемого объекта, заданная как неотрицательный действительный скаляр. Единицы измерения в метрах в секунду.
Пример: 20
Maximum allowed occlusion for detector - Максимально допустимая окклюзия объекта0.5 (по умолчанию) | вещественный скаляр в диапазоне [0 1)Максимально допустимая окклюзия объекта, заданная как действительный скаляр в диапазоне [0 1). Окклюзия - это доля общей площади поверхности объекта, которая не видна датчику. Значение 1 указывает, что объект полностью закрыт. Единицы измерения безразмерны.
Пример: 0.2
Minimum detectable image size of an object (pixels) - Минимальная высота и ширина объекта[15,15] (по умолчанию) | вектор 1 на 2 положительных значенийМинимальная высота и ширина объекта, обнаруженного датчиком зрения в изображении, заданная как [minHeight,minWidth] вектор положительных значений. 2-D спроецированная высота объекта должна быть больше или равна minHeight. Спроецированная ширина объекта должна быть больше или равна minWidth. Единицы измерения выражены в пикселях.
Пример: [25 20]
Probability of detecting a target - Вероятность обнаружения0.9 (по умолчанию) | положительный действительный скаляр, меньший или равный 1Вероятность обнаружения цели, заданная как положительный действительный скаляр, меньший или равный 1. Эта величина определяет вероятность того, что датчик обнаружит обнаруживаемый объект. Обнаруживаемый объект - это объект, удовлетворяющий минимальным обнаруживаемым размерам, максимальному диапазону, максимальной скорости и максимально допустимым ограничениям окклюзии.
Пример: 0.95
Number of false positives per image - Количество ложных обнаружений, генерируемых датчиком зрения на изображение0.1 (по умолчанию) | неотрицательный вещественный скалярКоличество ложных обнаружений, генерируемых датчиком зрения на изображение, указанное как неотрицательный действительный скаляр.
Пример: 1.0
Minimum lane size in image (pixels) - Максимальный размер полосы движения[20,3] (по умолчанию) | 1 на 2 действительный векторМинимальный размер проецируемой разметки полосы движения на изображении камеры, которую датчик может обнаружить после учета кривизны, определяемый как действительный вектор формы 1 на 2 [minHeight, minWidth]. Для обнаружения разметка полосы движения должна превышать оба этих значения. Единицы измерения выражены в пикселях.
Accuracy of lane boundary (pixels) - Точность границы полосы движения3 (по умолчанию) | положительный вещественный скалярТочность границ полосы движения, заданная как положительный действительный скаляр. Этот параметр определяет точность, с которой датчик полосы может разместить границу полосы. Единицы измерения выражены в пикселях.
Пример: 2.5
Add noise to measurements - Возможность добавления шума к измерениям датчиков зренияon (по умолчанию) | offВыберите этот параметр для добавления шума к измерениям датчика зрения. В противном случае измерения не содержат шума. MeasurementNoise свойство каждого обнаружения всегда вычисляется и не зависит от значения, указанного для параметра Add noise to measurements.
Select method to specify initial seed - Метод определения начального числа генератора случайных чиселRepeatable (по умолчанию) | Specify seed | Not repeatableМетод установки начального значения генератора случайных чисел, указанного как один из параметров в таблице.
| Выбор | Описание |
|---|---|
Repeatable | Блок генерирует случайное начальное начальное число для первого моделирования и повторно использует это начальное число для всех последующих моделирований. Выберите этот параметр для создания воспроизводимых результатов из статистической модели датчика. Для изменения начального начального значения в командной строке MATLAB введите: |
Specify seed | Укажите собственное произвольное начальное значение для воспроизводимых результатов с помощью параметра Начальное начальное значение (Initial seed). |
Not repeatable | Блок генерирует новое случайное начальное начальное значение после каждого прогона моделирования. Выберите этот параметр, чтобы создать неповторяемые результаты из статистической модели датчика. |
Initial seed - Начальное число генератора случайных чисел1 (по умолчанию) | неотрицательное целое число менее 232Начальное число генератора случайных чисел, указанное как неотрицательное целое число меньше 232.
Пример: 2001
Чтобы включить этот параметр, установите метод Select, чтобы задать начальный начальный параметр, как Specify seed.
Focal length (pixels) - Фокусное расстояние камеры[800,800] (по умолчанию) | двухэлементный действительный векторФокусное расстояние камеры в пикселях, заданное как двухэлементный действительный вектор. См. также FocalLength имущество cameraIntrinsics.
Пример: [480,320]
Optical center (pixels) - Оптический центр камеры[320,240] (по умолчанию) | двухэлементный действительный векторОптический центр камеры в пикселях, заданный как двухэлементный действительный вектор. См. также PrincipalPoint имущество cameraIntrinsics.
Пример: [480,320]
Image size (pixels) - Размер изображения, создаваемого камерой[480,640] (по умолчанию) | двухэлементный вектор положительных целых чиселРазмер изображения, создаваемого камерой, в пикселях, определяемый как двухэлементный вектор положительных целых чисел. См. также ImageSize имущество cameraIntrinsics.
Пример: [240,320]
Radial distortion coefficients - Коэффициенты радиального искажения[0,0] (по умолчанию) | двухэлементный действительный вектор | трехэлементный действительный векторКоэффициенты радиального искажения, заданные как двухэлементный или трехэлементный действительный вектор. Для получения подробной информации об установке этих коэффициентов см. RadialDistortion имущество cameraIntrinsics.
Пример: [1,1]
Tangential distortion coefficients - Коэффициенты тангенциального искажения[0,0] (по умолчанию) | двухэлементный действительный векторКоэффициенты тангенциального искажения, заданные как двухэлементный действительный вектор. Для получения подробной информации об установке этих коэффициентов см. TangentialDistortion имущество cameraIntrinsics.
Пример: [1,1]
Skew of the camera axes - Угол наклона осей камеры0 (по умолчанию) | вещественный скалярУгол наклона осей камеры, заданный как действительный скаляр. См. также Skew имущество cameraIntrinsics.
Пример: 0.1
Output actor truth - Выходная достоверная информация о действующих лицахoff (по умолчанию) | onВыберите этот параметр для вывода базовой истинности актёров на выходном порту Actor Truth.
Output lane truth - Вывод достоверных данных о земле границ полос движенияoff (по умолчанию) | onВыберите этот параметр для вывода истинного состояния на земле границ полосы на выходном порту «Lane Truth».
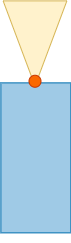
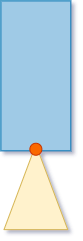
Датчик не может обнаружить полосы движения и объекты из точек обзора слишком близко к земле. После установки блока датчиков на транспортном средстве с помощью параметра «Имя родителя» установите параметр «Расположение монтажа» в одно из предварительно определенных мест монтажа на транспортном средстве.
Если оставить для параметра «Расположение монтажа» значение Origin, который устанавливает датчик на землю ниже центра транспортного средства, затем укажите смещение, которое находится на высоте не менее 0,1 метра над землей. Выберите «Указать смещение» и в параметре «Относительное перемещение» [X, Y, Z] (m) задайте значение Z не менее 0.1.
Для визуализации обнаружений и зон действия датчиков используйте область действия «Птичий глаз». См. раздел Визуализация данных датчиков из среды моделирования нереального двигателя.
Поскольку запуск Unreal Engine может занять много времени между моделированиями, рассмотрите возможность регистрации сигналов, выводимых датчиками. См. раздел Настройка сигнала для регистрации (Simulink).
Для генерации обнаружений блок «Генератор моделирования 3D обнаружения изображения» подает данные об истинности объекта и полосы движения, считываемые из среды моделирования нереального двигателя, в блок «Генератор обнаружения изображения». Этот блок возвращает обнаружения, основанные на кубоидных или коробчатых представлениях актёров. Физические размеры обнаруженных субъектов не зависят от их размеров в среде Unreal Engine. Вместо этого они основаны на значениях по умолчанию, заданных на вкладке параметров Actor Profiles блока Vision Detection Generator, если для параметра Select method to specify actor profiles установлено значение Parameters. С этими дефолтами все актеры примерно размером с седан. Если вы возвращаете обнаружения, которые имеют окклюзии, то окклюзии основаны на всех актерах такого размера.