Automated Driving Toolbox™ предоставляет структуру совместного моделирования, которая моделирует алгоритмы управления в Simulink ® и визуализирует их производительность в виртуальной среде моделирования. В этой среде используется Unreal Engine ® от Epic Games ®.
Блоки симулятора, относящиеся к среде моделирования, можно найти в библиотеке блоков Automated Driving Toolbox > Simulation 3D. Эти блоки обеспечивают возможность:
Настройка сцен в среде моделирования.
Размещение и перемещение транспортных средств в пределах этих сцен.
Настройте камеры, радары и лидарные датчики на транспортных средствах.
Моделирование выходных сигналов датчиков на основе окружающей среды вокруг транспортного средства.
Получение исходных данных истинности для семантической сегментации и глубинной информации.
Этот инструмент моделирования обычно используется для дополнения реальных данных при разработке, тестировании и проверке производительности автоматических алгоритмов вождения. В сочетании с моделью транспортного средства эти блоки можно использовать для реалистичного моделирования с замкнутым контуром, охватывающего весь автоматизированный набор вождения, от восприятия до управления.
Дополнительные сведения о среде моделирования см. в разделе Как работает моделирование нереального двигателя для автоматического вождения.
Для доступа к библиотеке «Automated Driving Toolbox > Simulation 3D» в командной строке MATLAB ® введитеdrivingsim3d.
Чтобы настроить модель для совместного моделирования с расчетной средой, добавьте в модель блок «Моделирование» 3D «Конфигурация сцены». С помощью этого блока можно выбрать из набора заранее построенных сцен, где можно протестировать и визуализировать алгоритмы вождения. Этот блок также можно использовать для управления положением солнца и погодными условиями в сцене. Следующее изображение из сцены Virtual Mcity.

Панель инструментов включает эти сцены.
| Сцена | Описание |
|---|---|
| Прямая дорога | Отрезок прямой дороги |
| Криволинейная дорога | Изогнутая, закольцованная дорога |
| Стоянка | Пустая стоянка |
| Изменение двойной полосы | Прямая дорога с бочками и дорожными знаками, которые установлены для выполнения маневра изменения двойной полосы движения |
| Открытая поверхность | Плоское черное покрытие дорожного покрытия без дорожных объектов |
| Городской блок США | Городской квартал с перекрестками, шлагбаумами и светофорами |
| Автомагистраль США | Шоссе с конусами, шлагбаумами, светофорами и дорожными знаками |
| Большая стоянка | Стоянка с припаркованными автомобилями, шишками, бордюрами и дорожными знаками |
| Виртуальный Макити | Городская среда, представляющая доказательства Мичиганского университета (см. Mcity Test Facility); включает конусы, барьеры, животное, светофоры и дорожные знаки |
Если имеется пакет поддержки «Автоматизированный интерфейс панели инструментов управления для проектов Unreal Engine 4», можно изменить эти сцены или создать новые. Дополнительные сведения см. в разделе Настройка сцен нереального механизма для автоматического вождения.
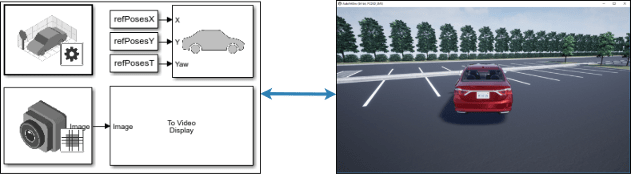
Чтобы определить виртуальное транспортное средство в сцене, добавьте Моделирование 3D Транспортное средство с Землей После блока к Вашей модели. С помощью этого блока можно управлять движением транспортного средства, указывая значения X, Y и Yaw, которые определяют его положение и ориентацию на каждом шаге времени. Транспортное средство автоматически перемещается по земле.
Можно также указать цвет и тип транспортного средства. Набор инструментов включает следующие типы транспортных средств:
Можно определить виртуальные датчики и прикрепить их к различным позициям на транспортных средствах. Панель инструментов включает эти блоки моделирования и конфигурирования датчиков.
| Блок | Описание |
|---|---|
| Моделирование 3D камеры | Модель камеры с объективом. Включает параметры размера изображения, фокусного расстояния, искажения и перекоса. |
| Имитация 3D камера Fisheye | Камера Fisheye, которую можно описать с помощью модели камеры Scaramuzza. Включает параметры центра искажения, размер изображения и коэффициенты отображения. |
| Моделирование 3D Лидар | Сканирование модели лидарного сенсора. Включает параметры для диапазона обнаружения, разрешения и полей обзора. |
| Имитационный 3D вероятностный радар | Вероятностная радиолокационная модель, которая возвращает список обнаружений. Включает параметры точности РЛС, смещения РЛС, вероятности обнаружения и сообщения об обнаружении. Он не имитирует радар на уровне распространения электромагнитных волн. |
| Моделирование 3D вероятностная конфигурация радара | Настраивает сигнатуры радара для всех субъектов, обнаруженных блоками имитационного 3D вероятностного радара в модели. |
| Генератор моделирования 3D обнаружения видения | Модель камеры, которая возвращает список обнаруженных объектов и границ полосы движения. Включает параметры для моделирования точности обнаружения, шума измерений и характеристик камеры. |
Дополнительные сведения о выборе датчика см. в разделе Выбор датчика для моделирования нереального двигателя.
Блоки моделирования Automated Driving Toolbox предоставляют инструменты для тестирования и визуализации планирования пути, управления транспортным средством и алгоритмов восприятия.
Среду моделирования Unreal Engine можно использовать для визуализации движения транспортного средства в заранее созданной сцене. Эта среда предоставляет возможность анализа производительности планирования пути и алгоритмов управления транспортным средством. После разработки этих алгоритмов в Simulink можно использовать drivingsim3d библиотека для визуализации движения транспортного средства в одной из предварительно построенных сцен.
Пример планирования пути и визуализации алгоритма управления транспортным средством см. в разделе Визуализация автоматической парковки с использованием имитации нереального двигателя.
Automated Driving Toolbox предоставляет несколько блоков для детального моделирования камер, радаров и лидарных сенсоров. Устанавливая эти датчики на транспортные средства в пределах виртуальной среды, вы можете генерировать синтетические данные датчиков или их обнаружение для проверки производительности ваших моделей датчиков на соответствие алгоритмам восприятия. Пример создания радиолокационных детекторов см. в разделе Моделирование датчиков зрения и радаров в среде нереального двигателя.
Вы также можете выводить и визуализировать наземные истинные данные для проверки алгоритмов оценки глубины и обучения семантической сегментации сетей. Пример см. в разделе Визуализация глубины и семантической сегментации с использованием моделирования нереального механизма.
Разработка алгоритма локализации и оценка его эффективности в различных условиях является сложной задачей. Одной из самых больших проблем является установление истины. Хотя с помощью дорогостоящих высокоточных инерциальных навигационных систем (INS) можно получить достоверную информацию о земле, виртуальное моделирование является экономически эффективной альтернативой. Использование моделирования позволяет проводить тестирование в различных сценариях и конфигурациях датчиков. Это также обеспечивает быструю итерацию развития и предоставляет точную достоверную информацию. Пример разработки и оценки алгоритма локализации лидара с использованием синтетических данных лидара из среды моделирования Unreal Engine см. в разделе Локализация лидара с моделированием Unreal Engine.
После проектирования и тестирования системы восприятия в среде моделирования можно использовать эту систему для управления системой управления, которая фактически управляет транспортным средством. В этом случае, вместо того, чтобы вручную устанавливать траекторию, транспортное средство использует систему восприятия для своего движения. Комбинируя восприятие и управление в замкнутой системе в среде моделирования 3D, вы можете разрабатывать и тестировать более сложные алгоритмы, такие как помощь в поддержании полосы движения и адаптивный круиз-контроль.
Пример системы с замкнутым контуром в среде Unreal Engine см. в разделе Highway Lane Following.
