Визуализация покрытий датчиков, обнаружений и следов
Bird 's-Eye Scope визуализирует аспекты сценария вождения, найденного в модели Simulink ® .
Используя область, можно:
Осмотрите зоны действия радаров, датчиков зрения и лидаров.
Анализ обнаружений датчиков действующих лиц, границ дорог и границ полос движения.
Анализ результатов отслеживания движущихся субъектов в рамках сценария.
Чтобы начать работу, откройте область и щелкните Найти сигналы. Область действия обновляет блок-схему, находит сигналы, представляющие аспекты сценария вождения, организует сигналы в группы и отображает сигналы. Затем можно анализировать сигналы при моделировании, упорядочивать сигналы в новые группы и изменять графическое отображение сигналов.
Дополнительные сведения об использовании области см. в разделе Визуализация данных датчиков и дорожек в области птичьего глаза.
Панель инструментов Simulink:
На вкладке Моделирование (Simulation) в разделе Результаты проверки (Review Results) щелкните Область обзора птичьего глаза (Bird-Eye Scope
На вкладке «Приложения» в разделе «Обработка сигналов и беспроводные коммуникации» выберите Область «Птичий глаз».
Longitudinal axis limits - Пределы продольной оси[-60,60] (по умолчанию) | [мин, макс] векторПределы продольной оси, заданные как вектор [min, max].
Настраиваемый: Да
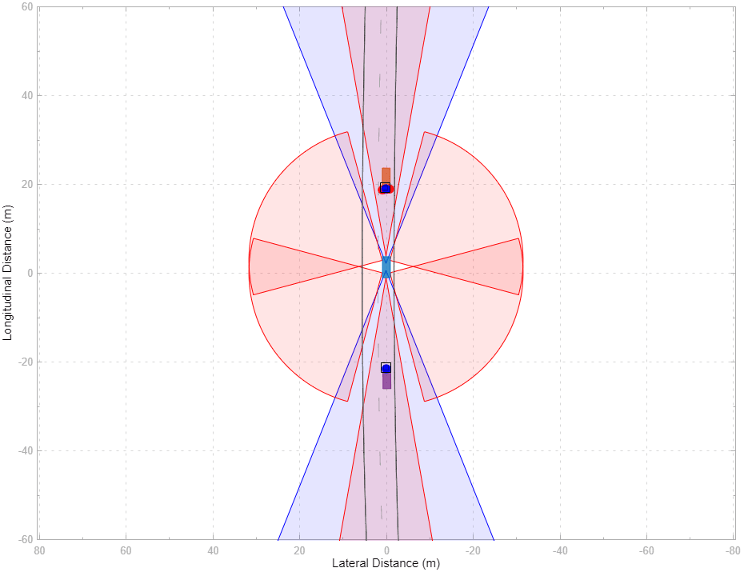
Lateral axis limits - Пределы поперечной оси[-30,30] (по умолчанию) | [мин, макс] векторПределы поперечной оси, заданные как вектор [min, max].
Настраиваемый: Да
Track position selector - Матрица выбора, используемая для извлечения позиций отслеживаемых объектов[1,0,0,0,0,0; 0,0,1,0,0,0] (по умолчанию) | 2 на n матрица нулей и единицМатрица выбора, используемая для извлечения позиций дорожек, выводимых блоком Multi-Object Tracker. Область извлекает позиции из векторов состояния дорожек, которые хранятся в State поля структур выходных дорожек. Если указан неправильный выбор, в области отображаются неправильные позиции дорожки.
Укажите селектор положения дорожки как матрицу нулей и единиц 2 на n, где n - размер векторов состояния по всем дорожкам. Эти векторы состояния содержат информацию о положении, скорости, ускорении и другом состоянии отслеживаемых объектов.
Матрица выбора по умолчанию выбирает положения следа из 3D вектора состояния постоянной скорости формы [x;vx;y;vy;z;vz]. Для каждой дорожки область действия умножает матрицу выбора на вектор состояния для получения x-позиции и y-позиции, как показано здесь:
[1,0,0,0,0,0; 0,0,1,0,0,0] * [x;vx;y;vy;z;vz] = [x;y]
Примеры кода MATLAB ®, иллюстрирующие этот процесс выбора, см. в разделеgetTrackPositions функции и multiObjectTracker объект.
Форматы вектора состояния и соответствующей матрицы выбора зависят от фильтра Калмана, который блок Multi-Object Tracker использует для отслеживания объектов. Предположим, что блок Multi-Object Tracker инициализируется для использования 2-D линейного фильтра Калмана с постоянной скоростью, где параметр Filter initialization function name блока имеет значение initcvkf функция. Для этого типа фильтра состояния дорожки имеют вид [x;vx;y;vy]. Чтобы визуализировать положения дорожек, выводимых этим блоком, установите переключатель положения дорожек в значение [1,0,0,0; 0,0,1,0].
Настраиваемый: Нет
Track velocity selector - Матрица выбора, используемая для извлечения скоростей отслеживаемых объектов[0,1,0,0,0,0; 0,0,0,1,0,0] (по умолчанию) | 2 на n матрица нулей и единицМатрица выбора, используемая для извлечения скоростей дорожек, выводимых блоком Multi-Object Tracker. Объем извлекает скорости из векторов состояния дорожек, которые хранятся в State поля структур выходных дорожек. Если указан неправильный выбор, в области отображаются неверные скорости пути.
Укажите селектор скорости дорожки как 2 на n матрицу нулей и единиц, где n - размер векторов состояния по всем дорожкам. Эти векторы состояния содержат информацию о положении, скорости, ускорении и другом состоянии отслеживаемых объектов.
Матрица выбора по умолчанию выбирает скорости следа из 3D вектора состояния постоянной скорости формы [x;vx;y;vy;z;vz]. Для каждой дорожки область действия умножает матрицу выбора на вектор состояния для получения скоростей дорожки в направлении x. vxи y-направление, vy, как показано здесь:
[0,1,0,0,0,0; 0,0,0,1,0,0] * [x;vx;y;vy;z;vz] = [vx;vy]
Примеры кода MATLAB, иллюстрирующие этот процесс выбора, см. в разделе getTrackVelocities функции и multiObjectTracker объект.
Форматы вектора состояния и соответствующей матрицы выбора зависят от фильтра Калмана, который блок Multi-Object Tracker использует для отслеживания объектов. Предположим, что блок Multi-Object Tracker инициализируется для использования 2-D линейного фильтра Калмана с постоянной скоростью, где параметр Filter initialization function name блока имеет значение initcvkf функция. Для этого типа фильтра состояния дорожки имеют вид [x;vx;y;vy]. Чтобы визуализировать скорости дорожек, выводимых этим блоком, установите переключатель скорости дорожек в значение [0,1,0,0; 0,0,0,1].
Настраиваемый: Нет
Display short signal names - Отображение имен сигналов без информации о трактеon (по умолчанию) | offВыберите этот параметр для отображения имен коротких сигналов (сигналы без информации о тракте).
Снимите флажок для отображения длинных имен сигналов (сигналов с информацией о тракте).
Рассмотрим сигнал VisionDetection внутри подсистемы Sensor Simulation. При выборе этого параметра, краткое имя, VisionDetection, отображается. При сбросе этого параметра длинное имя Sensor Simulation/VisionDetection, отображается.
Настраиваемый: Да
Alpha - прозрачность зоны охвата;0.1 (по умолчанию) | вещественный скаляр в диапазоне [0, 1]Прозрачность зоны покрытия, заданная как действительный скаляр в диапазоне [0, 1]. Значение 0 делает зону покрытия полностью прозрачной. Значение 1 делает зону покрытия полностью непрозрачной.
Это свойство доступно только для сигналов в группе Sensor Coverage.
Настраиваемый: Да
Velocity Scaling - Масштабный коэффициент для длины величины векторов скорости1 (по умолчанию) | вещественный скаляр в диапазоне [0, 20]Масштабный коэффициент для длины величины векторов скорости, заданной как действительный скаляр в диапазоне [0, 20]. Область действия отображает значение вектора величины как M × Масштабирование скорости, где M - величина скорости.
Это свойство доступно только для сигналов в группах Detections или Tracks.
Настраиваемый: Да
Общие ограничения
Ссылочные модели не поддерживаются. Чтобы визуализировать сигналы в ссылочных моделях, переместите выходные данные этих сигналов в модель верхнего уровня.
Режим быстрого ускорения не поддерживается.
Если инициализировать модель при быстром перезапуске, то после первого моделирования кнопка Найти сигналы (Find Signals) будет отключена. Чтобы снова включить функцию «Поиск сигналов», на вкладке «Отладка» панели инструментов Simulink нажмите кнопку «Быстрый перезапуск».
Ограничения блоков считывателя сценариев
Bird 's-Eye Scope не поддерживает визуализацию в модели, которая содержит:
Несколько блоков чтения сценариев.
Блок считывателя сценариев в невиртуальной подсистеме, такой как атомарная или включенная подсистема.
Блок считывателя сценариев, сконфигурированный для вывода действующих лиц и границ полос движения в мировых координатах (система координат выходных параметров установлена в World Coordinates).
Для блоков считывателя сценариев, в которых указывается транспортное средство ego с помощью входного порта Ego Vehicle, сигнал транспортного средства ego должен быть подключен непосредственно к блоку. Визуализация сигналов эго-транспортного средства, выводимых из невиртуальной подсистемы или ссылочной модели, не поддерживается.
3D Ограничения блоков моделирования
Визуализация дорог, полос движения и актеров из блоков моделирования 3D конфигурации сцены не поддерживается. Если блок содержит блок «Моделирование» 3D «Конфигурация сцены», область «Птичий глаз» по-прежнему отображает эго-транспортное средство, но имеет размеры транспортного средства по умолчанию.
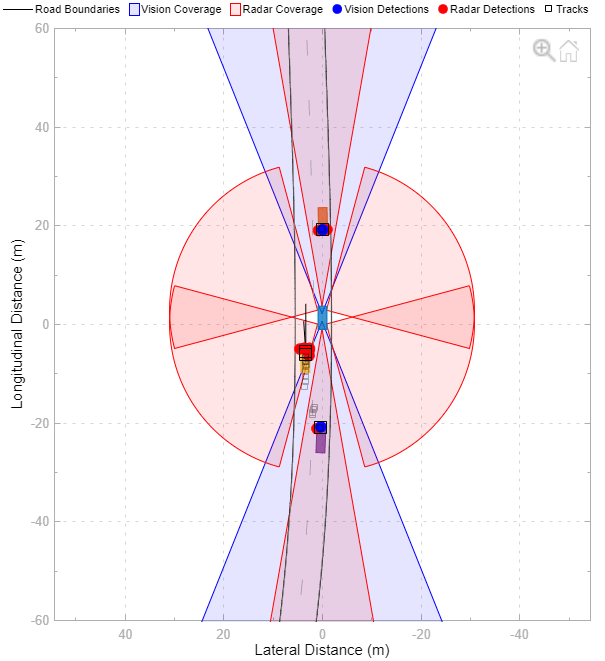
В области «Птичий глаз» в представлении по умолчанию отображается сценарий вождения в координатах транспортного средства. Во время моделирования этот вид отображает сценарий с точки зрения эго-транспортного средства. Этот ракурс используется для проверки аспектов сценария в непосредственной близости от эго-транспортного средства.
Можно также просмотреть сценарий движения в мировых координатах. На панели инструментов области щелкните Всемирные координаты (World Coordinates), чтобы открыть окно Просмотр мировых координат (World Coordinates View). Это окно используется для просмотра сценария в целом. Этот вид можно также использовать для проверки траекторий актеров, не находящихся в непосредственной близости от эго-транспортного средства.
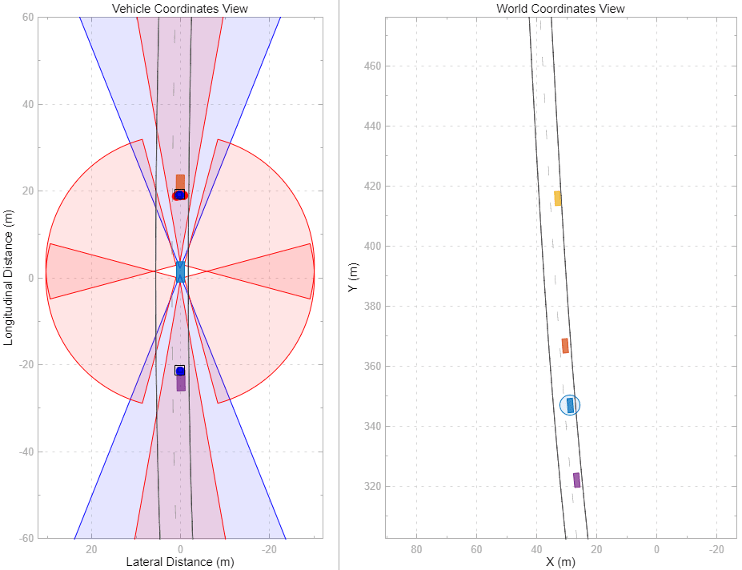
Для отображения дорог и полос в окне «Мировые координаты» нажмите кнопку «Найти сигналы». Для отображения эго-транспортного средства и других участников в сценарии выполните моделирование. В этом представлении не отображаются обнаруженные сигналы, дорожки, зоны покрытия датчиков и другие применимые сигналы. Просмотреть эти сигналы можно только в окне «Vehicle Coordinates View».
Примечание
В окне World Coordinates View круг вокруг эго-транспортного средства выделяет местоположение транспортного средства в сценарии. Это не зона покрытия датчика.
Чтобы найти источник сигнала в модели, на левой панели области щелкните правой кнопкой мыши сигнал и выберите Подсветить в модели (Highlight in Model).
При моделировании можно отображать или скрывать сигналы. Например, чтобы скрыть покрытие датчика, сначала выберите его в левой области. Затем на вкладке Свойства снимите флажок Показать покрытие датчика.
При повторном открытии области после сохранения и закрытия модели холст области первоначально остается пустым. Щелкните Найти сигналы (Find Signals), чтобы найти сигналы еще раз. Сигналы имеют те же свойства, что и при последнем сохранении модели.
Если моделирование выполняется слишком быстро, его можно замедлить с помощью динамики моделирования. На вкладке «Моделирование» панели инструментов «Simulink» выберите «Выполнить» > «Simulation Pacing». Затем установите флажок Включить ускорение моделирования (Enable pacing to slow simulation) и уменьшите время моделирования до значения, меньшего, чем время по умолчанию, равное одной секунде на секунду часов стены.
Чтобы лучше проверить сценарий, можно выполнить панорамирование и зумирование в окнах «Просмотр координат транспортного средства» и «Просмотр координат мира». Чтобы вернуться к отображению по умолчанию любого окна, в правом верхнем углу этого окна нажмите кнопку «Домой».![]()
Конкатенация обнаружения | Генератор радиолокационных данных | Генератор облака точек Lidar | Многообъектный трекер | Считыватель сценариев | Моделирование 3D Лидар | Имитационный 3D вероятностный радар | Генератор моделирования 3D обнаружения видения | Генератор обнаружения видения
