Model Predictive Control Toolbox™ предоставляет функции, приложения и блоки Simulink ® для проектирования и моделирования контроллеров с использованием линейного и нелинейного управления моделями (MPC). Панель инструментов позволяет задать модели растений и возмущений, горизонты, ограничения и веса. Выполнение моделирования с замкнутым циклом позволяет оценить производительность контроллера.
Можно настроить поведение контроллера, изменяя его вес и ограничения во время выполнения. Панель инструментов предоставляет развертываемые решатели оптимизации, а также позволяет использовать пользовательский решатель. Для управления нелинейной установкой можно реализовать адаптивные, запланированные по коэффициенту усиления и нелинейные контроллеры MPC. Для приложений с быстрой частотой дискретизации панель инструментов позволяет создать явный прогнозирующий контроллер модели из обычного контроллера или реализовать приблизительное решение.
Для быстрого создания прототипов и внедрения встроенной системы, включая развертывание решателей оптимизации, инструментарий поддерживает генерацию кода C и IEC 61131-3 структурированного текста.
Разработка модели прогнозирующего контроллера для непрерывного реактора с мешалкой (CSTR) с использованием MPC Designer.
Проектирование и моделирование контроллера прогнозирования модели для модели Simulink с помощью MPC Designer.
Проектирование и моделирование контроллера прогнозирования модели в командной строке MATLAB ®.
Создание и моделирование прогнозирующего контроллера модели для завода SISO.
Создание и моделирование прогнозирующего контроллера модели для завода с несколькими входами и одним выходом.
Создание и моделирование прогнозирующего контроллера модели для завода MIMO.
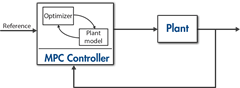
Модельные прогнозирующие контроллеры используют модели растений, возмущений и шума для прогнозирования и оценки состояния.
Контроллеры MPC используют их текущее состояние в качестве основы для прогнозов. В общем случае состояния контроллера не измеряются и должны быть оценены.
Модельные прогнозирующие контроллеры вычисляют оптимальные манипулируемые движения управления переменными путем решения квадратичной программы на каждом интервале управления.
Решатели контроллера прогнозирования QP модели преобразуют задачу оптимизации MPC в общую задачу квадратичного программирования.
Зачем использовать MPC?
Узнайте о преимуществах использования модельного прогностического контроля.
Что такое MPC?
Понимание рабочих принципов модельного прогностического контроля.

Расчетные параметры ПДК
Общие параметры проектирования MPC, такие как время выборки, горизонты, веса настройки и ограничения.
