Синхронная машина с полевой цепью и без демпфера
Simscape/Электрическая/Электромеханическая/Синхронная
Блок Synchronous Machine Model 1.0 использует упрощенную модель параметризации для синхронных машин. Используйте блок для моделирования синхронных машин с обмоткой возбуждения и без демпферов.
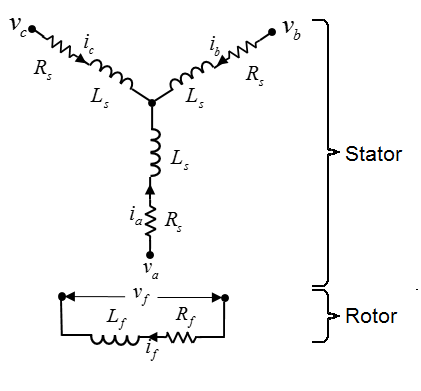
На рисунке показана эквивалентная электрическая цепь для обмоток статора и ротора.
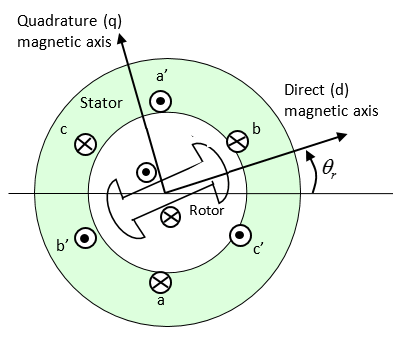
На схеме показана конструкция двигателя с одной полюсной парой на роторе. Для условного обозначения осей, когда механический угол λ r ротора равен нулю, потоки α - фазы и постоянного магнита выравниваются. Блок поддерживает определение второй оси ротора, для которой механический угол ротора определяется как угол между α - фазной магнитной осью и q-осью ротора.
Напряжения на обмотках статора определяются
d
где:
va, vb и vc - индивидуальные фазные напряжения на обмотках статора.
Rs - эквивалентное сопротивление каждой обмотки статора.
ia, ib и ic - токи, протекающие в обмотках статора.
В качестве скорости изменения магнитного потока в каждой обмотке статора используются d
Напряжение на обмотке поля выражается как
dstartfdt,
где:
vf - индивидуальное фазное напряжение на обмотке поля.
Rf - эквивалентное сопротивление обмотки возбуждения.
если - ток, протекающий в обмотке поля.
- скорость изменения магнитного потока в обмотке поля.
Постоянный магнит, обмотка возбуждения и три обмотки статора со звездообразной обмоткой вносят вклад в поток, связывающий каждую обмотку. Общий поток определяется как
LamfLbmfLcmf], если,
где:
в качестве общих потоков, связывающих каждую обмотку статора.
Laa, Lbb и Lcc являются самоиндукциями обмоток статора.
Lab, Lac, Lba, Lbc, Lca и Lcb являются взаимными индуктивами обмоток статора.
В качестве потоков намагничивания, связывающих обмотки статора, используются (в качестве потоков намагничивания).
Lamf, Lbmf и Lcmf - взаимные индуктивности обмотки поля.
Индуктивности в обмотках статора являются функциями электрического угла ротора и определяются
смещение ротора
2starte),
2δ/3)),
(
(
(
(
где:
N - число пар полюсов ротора.
startr - механический угол ротора.
starte - электрический угол ротора.
смещение ротора - 0 если вы определяете электрический угол ротора относительно оси d, или -pi/2 при определении электрического угла ротора относительно оси q.
Ls - самоиндуктивность статора на фазу. Это значение представляет собой среднюю самоиндуктивность каждой из обмоток статора.
Lm - флуктуация индуктивности статора. Это значение является флуктуацией собственной индуктивности и взаимной индуктивности с изменением угла ротора.
Ms - взаимная индуктивность статора. Это значение представляет собой среднюю взаимную индуктивность между обмотками статора.
Поток намагниченности, связывающий обмотку, a-a "- это максимум, когда (e) = 0 °, и ноль, когда (e) = 90 °. Поэтому:
(
и
iaibic],
где:
Lmf - индуктивность якоря взаимного поля.
λ f - поток, связывающий обмотку поля.
Lf - индуктивность обмотки возбуждения.
T - преобразование вектора Lmf, то есть
LamfLbmfLcmf].
Применение преобразования Park к уравнениям электрического определения блока создает выражение для крутящего момента, которое не зависит от угла ротора.
Преобразование Park определяется
((,,
При применении преобразования парка к первым двум электрическим определяющим уравнениям формируются уравнения, определяющие поведение блока:
NstartiqLq,
+ ifLmf),
32Lmfdiddt,
idiqLq),
и
− Bmλ.
где:
vd, vq и v0 - напряжения d-оси, q-оси и нулевой последовательности. Эти напряжения определяются
vavbvc].
id, iq и i0 - токи d-оси, q-оси и нулевой последовательности, определяемые
iaibic].
Ld - индуктивность d-оси статора. Ld = Ls + Ms + 3/2 Lm.
λ - механическая скорость вращения.
Lq - индуктивность по оси q статора. Lq = Ls + Ms − 3/2 Lm.
L0 - индуктивность нулевой последовательности статора. L0 = Ls - 2Ms.
T - крутящий момент ротора. Для блока Synchronous Machine Model 1.0 крутящий момент передается из корпуса машины (консервационный порт C блока) на ротор машины (консервационный порт R блока).
J - инерция ротора.
TL - момент нагрузки.
Bm - демпфирование ротора.
Блок имеет четыре дополнительных тепловых порта, по одному для каждой из трех обмоток статора и по одному для ротора. По умолчанию эти порты скрыты. Чтобы открыть тепловые порты, щелкните правой кнопкой мыши блок в модели, выберите Simscape > Block choices, а затем выберите требуемый вариант блока с тепловыми портами: Composite theral-phase ports | Show thermal port или Expanded threase-phase ports | Show thermal port. Это действие отображает тепловые порты на значке блока и отображает тепловые параметры. Эти параметры описаны далее на этой справочной странице.
Используйте тепловые порты для моделирования влияния сопротивления меди и потерь железа, которые преобразуют электроэнергию в тепло. Дополнительные сведения об использовании тепловых портов в блоках привода см. в разделе Моделирование тепловых эффектов во вращательных и поступательных приводах.
Параметры «Переменные» используются для задания приоритетов и начальных целевых значений для переменных блока перед моделированием. Дополнительные сведения см. в разделе Установка приоритета и начальной цели для переменных блока.
Распределение потока синусоидальное.
[1] Kundur, P. Стабильность и управление энергосистемой. Нью-Йорк, Нью-Йорк: Макгроу Хилл, 1993.
[2] Андерсон, П. М. Анализ неисправных энергосистем. IEEE Press, Power Systems Engineering, 1995.
[3] Ретиф, Дж. М., Х. Лин-Ши, А. М. Ллор и Ф. Моранд «Новое гибридное управление прямым крутящим моментом для синхронной машины ротора обмотки». IEEE 35-я ежегодная конференция специалистов по силовой электронике 2004 года. Т. 2 (2004): 1438-1442.
[4] Энергетическое общество IEEE. IEEE Std 1110-2002. Руководство IEEE по методам моделирования синхронных генераторов и применению в анализе стабильности энергосистемы. Пискатауэй, Нью-Джерси: IEEE, 2002.
BLDC | Машина с переключаемым сопротивлением | Цепь поля синхронной машины | Измерение синхронной машины | Синхронная машина модель 2.1 | Синхронная машина с круглым ротором | Явный полюс синхронной машины | Синхронная машина с нежелательной связью


