Геометрический якобиан для конфигурации робота
Инструментарий робототехнической системы/Алгоритмы манипуляторов
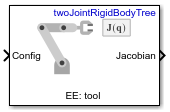
Блок Get Jacobian возвращает геометрический якобиан относительно основания для указанного концевого эффектора при заданной конфигурации rigidBodyTree модель робота.
Якобиан отображает скорость совместного пространства в конечную скорость эффектора относительно базовой рамки координат. Скорость конечного эффектора равна:
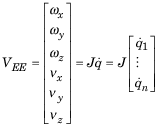
λ - это угловая скорость, start- линейная скорость и![]() скорость соединения между пространством.
скорость соединения между пространством.
Jacobian - Геометрический якобиан концевого эффектораГеометрический якобиан концевого эффектора с заданной конфигурацией, Config, возвращается в виде матрицы 6 на n, где n - число степеней свободы концевого эффектора. Якобиан отображает скорость совместного пространства в конечную скорость эффектора относительно базовой рамки координат. Скорость конечного эффектора равна:
λ - это угловая скорость, start- линейная скорость и![]() скорость соединения между пространством.
скорость соединения между пространством.

