Получение дисковых полей от размера диска и перекоса
umargin и diskmargin модельное усиление и изменение фазы как мультипликативный коэффициент F (s), принимающий значения на диске с центром на реальной оси. Диск описывается двумя параметрами: ɑ, устанавливающим размер вариации, и λ, или перекос, смещающий вариацию усиления в сторону увеличения или уменьшения. (Дополнительные сведения об этой модели см. в разделе Алгоритмы.) Диск в качестве альтернативы может быть описан по его перехватам по реальной оси.DGM = [gmin,gmax], которые представляют относительную величину изменения коэффициента усиления вокруг номинального значения F = 1. Использовать gm2dm и dm2gm для преобразования между ɑ,σ значениями и запасом усиления на основе диска DGM = [gmin,gmax] которые описывают один и тот же диск.
[ возвращает изменения коэффициента усиления и фазы, смоделированные диском с размером диска GM,PM] = dm2gm(alpha)alpha и нулевой перекос. Диск представляет собой выигрыш, который может варьироваться между 1/GM и GM умножить на номинальное значение и фазу, которая может изменяться на ±PM степени. Если alpha является вектором, функция возвращает GM и PM для каждой записи в векторе.
[ возвращает изменение коэффициента усиления на основе диска DGM,DPM] = dm2gm(alpha,sigma)DGM и изменение фазы на основе диска DPM соответствует диску, параметризованному alpha и sigma. DPM - вектор формы, [gmin,gmax], и DPM - вектор формы, [-pm,pm] соответствует размеру диска alpha и перекос sigma. Если alpha и sigma являются векторами, то функция возвращает диапазоны для пар alpha1,sigma1;...;alphaN,sigmaN.
Определение коэффициента усиления на основе диска и фазовых изменений, захваченных диском с размером α = 0,5.
alpha = 0.5; [GM,PM] = dm2gm(alpha)
GM = 1.6667
PM = 28.0725
Когда опускаешь sigma, dm2gm команда возвращает изменения коэффициента усиления и фазы, соответствующие α с нулевым наклоном. Нулевой перекос означает, что диск представляет выигрыш, который может увеличиться или уменьшиться на ту же величину. При этом α = 0,5 моделирует усиление, которое может увеличиваться или уменьшаться до коэффициента 1,6667 его номинального значения. Изменение фазы, соответствующее этому изменению коэффициента усиления на основе диска, равно ± 28 °. Визуализация этого диска.
diskmarginplot(alpha,0,'disk')
На графике показаны значения F в комплексной плоскости, соответствующие размеру диска alpha = 0,5 и sigma = 0. Вы можете видеть, что DGM = [1/GM,GM] для этого диска.
Определите коэффициент усиления на основе диска и фазовые изменения, смоделированные диском, параметризованным по размеру диска α = 0,6, и перекосу λ = 0,75.
alpha = 0.6; sigma = 0.75; [DGM,DPM] = dm2gm(alpha,sigma)
DGM = 1×2
0.6066 2.2632
DPM = 1×2
-34.2267 34.2267
Визуализируйте изменения усиления и фазы, представленные этим диском.
diskmarginplot(DGM)

Поскольку λ > 0, этот диск моделирует усиление, которое может увеличиться больше, чем может уменьшиться относительно номинального значения.
Определите коэффициент усиления на основе дисков и фазовые изменения, представленные дисками одного размера, но с различными перекосами.
alpha = 0.75; sigma = [-0.5;0;0.5]; [DGM,DPM] = dm2gm(alpha,sigma)
DGM = 3×2
0.3684 1.9231
0.4545 2.2000
0.5200 2.7143
DPM = 3×2
-41.7908 41.7908
-41.1121 41.1121
-41.7908 41.7908
Диски фиксируют примерно аналогичные фазовые изменения, но перекос смещает диск в сторону уменьшения или увеличения усиления. Для диска с нулевым наклоном изменение коэффициента усиления сбалансировано, что означает, что коэффициент усиления может увеличиваться или уменьшаться на ту же величину. Визуализация одновременного диапазона усиления и фазовых изменений, соответствующих каждой строке в DGM.
diskmarginplot(DGM)
![Figure contains an axes. The axes with title Range of gain and phase variations contains 3 objects of type patch. These objects represent DGM = [0.368,1.92], DPM = 41.8, DGM = [0.455,2.2], DPM = 41.1, DGM = [0.52,2.71], DPM = 41.8.](../../examples/robust/win64/EffectOfEccentricityOnModeledGainAndPhaseVariationsExample_01.png)
umargin и diskmargin моделируют усиление и фазовые изменения в отдельном канале обратной связи в качестве частотно-зависимого мультипликативного коэффициента F (s), умножающего номинальный отклик с разомкнутым контуром L (s), так что возмущенный отклик равен L (s) F (s). Коэффициент F (ы) параметризуется следующим образом:
В этой модели
δ (s) - динамическая неопределенность, ограниченная коэффициентом усиления, нормализованная таким образом, что она всегда изменяется в пределах единичного диска (||δ||∞ < 1).
ɑ устанавливает величину усиления и изменения фазы, смоделированную F. Для фиксированного λ параметр ɑ управляет размером диска. Для ɑ = 0 мультипликативный коэффициент равен 1, что соответствует номинальному L.
, называемый перекосом, смещает смоделированную неопределенность в сторону увеличения или уменьшения усиления.
Коэффициент F принимает значения на диске, центрированном по реальной оси и содержащем номинальное значение F = 1. Диск характеризуется своим перехватом DGM = [gmin,gmax] с действительной осью. gmin < 1 и gmin > 1 - минимальное и максимальное относительные изменения коэффициента усиления, смоделированные по F, на номинальной фазе. Фазовая неопределенность, смоделированная F, представляет собой диапазон DPM = [-pm,pm] фазовых значений при номинальном усилении (| F | = 1). Например, на следующем графике справа показан диск F, пересекающий действительную ось в интервале [0.71.1.4]. В левой части показано, что этот диск моделирует вариацию усиления ± 3 дБ и вариацию фазы ± 19 °.
DGM = [0.71,1.4]
F = umargin('F',DGM)
plot(F)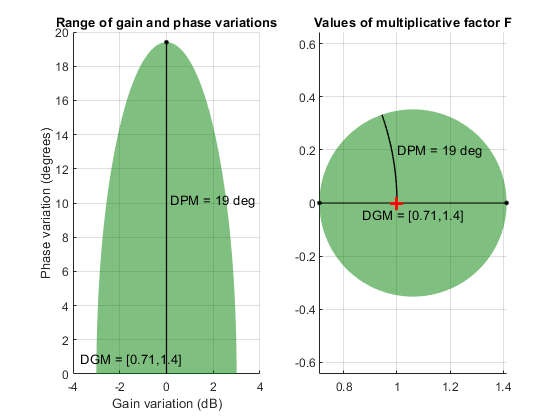
gm2dm и gm2dm преобразует между этими двумя способами задания диска мультипликативного усиления и фазовой неопределенности: диапазон изменения усиления вида DGM = [gmin,gmax]и ɑ,σ параметризацию соответствующего диска.
Дополнительные сведения о модели неопределенности для изменений коэффициента усиления и фазы см. в разделе Анализ стабильности с использованием полей диска.
diskmargin | diskmarginplot | gm2dm | umargin | wcdiskmargin
