Эта справочная заявка представляет полную модель динамики транспортного средства, проходящую испытание на торможение, включая испытание на расщепление. Можно создать собственные версии, создав структуру для проверки соответствия транспортного средства требованиям к конструкции при нормальных и экстремальных условиях вождения. Используйте это справочное приложение в исследованиях по вождению и управлению и разработке системы управления шасси для характеристики динамики транспортного средства во время испытания на торможение. Информацию об этом и подобных маневрах см. в стандартах SAE J299_2009014 и ISO 21994:20075.
Для тестирования расширенных систем помощи водителю (ADAS) и автоматизированного программного обеспечения для восприятия, планирования и управления вождением можно запустить маневр в 3D среде. Требования к платформе модуля визуализации 3D и рекомендации по аппаратному обеспечению см. в разделе Требования и ограничения модуля визуализации 3D.
Для создания и открытия рабочей копии приложения ссылки на постоянный радиус введите
В этой таблице представлены блоки и подсистемы эталонного приложения. Некоторые подсистемы содержат варианты.
| Ссылочный элемент приложения | Описание | Варианты |
|---|---|---|
Опорный генератор прямого маневра | Генерирует команды акселератора и тормоза для проведения прямолинейного маневра. Ускорение начинается с заданной скоростью до тех пор, пока транспортное средство не достигнет заданного значения продольной скорости. Контроллер транспортного средства поддерживает уставку продольной скорости в течение заданного времени или расстояния. Затем контроллер замедляет транспортное средство. При необходимости укажите условия отказа перед торможением во время теста split-mu. Если скорость транспортного средства, угол поворота рулевого управления или скорость рыскания не находятся в пределах допустимого диапазона перед торможением, блок устанавливает состояние неисправности. Значения по умолчанию соответствуют стандарту ISO 145126. | ✓ |
Команды драйвера | Реализует модель водителя, используемую эталонным приложением для генерации команд ускорения, торможения, передачи и рулевого управления. По умолчанию вариантом подсистемы команд драйвера является блок прогнозирующего драйвера. | ✓ |
Окружающая среда | Реализует силы ветра и дороги, включая коэффициент масштабирования постоянного или разделенного коэффициента трения. | ✓ |
Контроллеры | Реализует контроллеры для блоков управления двигателем (ЭКУ), трансмиссий, антиблокировочных тормозных систем (АБС) и активных дифференциалов. | ✓ |
Пассажирское транспортное средство | Реализует:
| ✓ |
Визуализация | Обеспечивает траекторию движения транспортного средства, реакцию водителя и визуализацию 3D. Чтобы позволить 3D визуализацию, установите 3D параметр Блока двигателя 3D параметр Двигателя на Позволенный. Для минимальных 3D требований к оборудованию окружающей среды визуализации посмотрите 3D Требования Двигателя Визуализации и Ограничения. | ✓ |
Чтобы переопределить вариант по умолчанию, на вкладке Моделирование (Modeling) в разделе Проект (Design) щелкните раскрывающийся список. В разделе «Общие» выберите «Диспетчер исполнения». В Диспетчере вариантов перейдите к варианту, который требуется использовать. Щелкните правой кнопкой мыши и выберите Переопределить с помощью этого варианта.
Блок генератора отсчёта прямого манёвра генерирует команды акселератора и тормоза для проведения прямого манёвра. Ускорение начинается с заданной скоростью до тех пор, пока транспортное средство не достигнет заданного значения продольной скорости. Контроллер транспортного средства поддерживает уставку продольной скорости в течение заданного времени или расстояния. Затем контроллер замедляет транспортное средство.
Параметры маневра используются для указания времени начала маневра, уставки скорости, ускорения и замедления.
При необходимости на вкладке Параметры отслеживания выберите Включить отслеживание неисправностей перед торможением. Используйте параметры для указания условий отказа перед торможением во время теста разделения. Если скорость транспортного средства, угол поворота рулевого управления или скорость рыскания не находятся в пределах допустимого диапазона перед торможением, блок устанавливает состояние неисправности. Значения по умолчанию соответствуют стандарту ISO 145126.
Дополнительные сведения см. в разделе Генератор привязок прямого маневра.
Блок команд водителя реализует модель водителя, используемую эталонным приложением для генерации команд ускорения, торможения, передачи и рулевого управления. По умолчанию, если выбран параметр блока Генератор привязок (Reference Generator) Использовать специфичный для маневра драйвер, исходное положение и сцену, приложение привязки выбирает драйвер для указанного маневра.
Настройка режима команд транспортного средства | Внедрение |
|---|---|
| Продольный блок привода - регулятор продольной скорости. На основе опорных скоростей и скоростей обратной связи блок генерирует нормализованные команды ускорения и торможения, которые могут изменяться от 0 до 1. Используйте блок для моделирования динамической реакции драйвера или для генерации команд, необходимых для отслеживания цикла продольного привода. |
| Прогнозирующий блок машиниста - контроллер, который генерирует нормализованные команды рулевого управления, ускорения и торможения для отслеживания продольной скорости и бокового опорного смещения. Нормализованные команды могут варьироваться от -1 до 1. Контроллер использует одноколейную (велосипедную) модель для оптимального одноточечного предварительного просмотра. |
| Система с разомкнутым контуром позволяет настроить эталонное приложение для ввода команд управления, ускорения, торможения и передачи на постоянной или сигнальной основе. |
Подсистема Environment реализует силы ветра и дороги, включая коэффициент масштабирования постоянного или разделенного коэффициента трения.
Используйте параметр «Тип блока трения дорожных дорожек» поверхности, чтобы задать коэффициент масштабирования коэффициента трения:
Constant friction coefficient scaling factor - Постоянное трение поверхности во время маневра
Split friction coefficient scaling factor - Два коэффициента трения
Выберите эту опцию, чтобы задать коэффициенты масштабирования трения для испытания на торможение с разделением. Используйте включенные параметры для установки коэффициентов масштабирования коэффициента трения земли и коэффициента трения прямоугольной поверхности.
Дополнительные сведения см. в разделе Трение дорожек.
Эталонное приложение имеет эти варианты обратной связи.
| Окружающая среда | Вариант | Описание |
|---|---|---|
Обратная связь с землей |
| Использует блок датчика рельефа транспортного средства для отслеживания лучей в 3D среде. |
| Реализует коэффициент масштабирования постоянного или разделенного коэффициента трения на основе выходных данных блока «Трение дорожек». |
Подсистема контроллеров генерирует команды крутящего момента двигателя, трансмиссии, тормозного давления и дифференциального давления.
Контроллер ECU генерирует команду крутящего момента двигателя. Контроллер предотвращает перегрузку двигателя, ограничивая команду крутящего момента двигателя значением, указанным переменной рабочего пространства модели. EngRevLim. По умолчанию значение равно 7000 об/мин. Если команда дифференциального крутящего момента превышает команду ограниченного крутящего момента двигателя, ЭБУ устанавливает команду крутящего момента двигателя на заданный дифференциальный крутящий момент.
Подсистема контроллера передачи генерирует команду передачи. Контроллер включает в себя эти варианты.
| Вариант | Описание |
|---|---|
| Реализует модуль управления трансмиссией (TCM), использующий логику Stateflow ® для генерации команды передачи на основе ускорения транспортного средства, скорости вращения колес и частоты вращения двигателя. |
| Управление передачей по разомкнутому контуру. Контроллер устанавливает команду на передачу в соответствии с запросом на передачу. |
| Реализует модуль управления трансмиссией (TCM), который использует логику Stateflow для генерации команды передачи на основе ускорения транспортного средства, команды торможения, частоты вращения колеса, частоты вращения двигателя и запроса передачи. |
| Реализует контроллер лопастей, использующий ускорение транспортного средства и частоту вращения двигателя для формирования команды передачи. |
Подсистема контроллера тормозов реализует подсистему управления тормозным давлением для формирования команды давления тормоза. Подсистема управления тормозным давлением имеет следующие варианты.
| Вариант | Описание |
|---|---|
| Реализует контроллер обратной связи ABS, который переключается между двумя состояниями для регулирования проскальзывания колеса. Управление bang-bang минимизирует ошибку между фактическим проскальзыванием и желаемым проскальзыванием. Для требуемого проскальзывания контроллер использует значение проскальзывания, при котором кривая проскальзывания достигает пикового значения. Это желаемое значение проскальзывания является оптимальным для минимального тормозного пути. |
| Управление тормозами с разомкнутым контуром. Контроллер устанавливает для команды тормозного давления эталонное тормозное давление на основе команды тормоза. |
| Управление ABS в пяти состояниях при моделировании маневра.1,2,3 Контроллер ABS в пяти состояниях использует логическое переключение на основе замедления колеса и ускорения транспортного средства для управления тормозным давлением на каждом колесе. Для предотвращения блокировки колес, уменьшения тормозного пути или поддержания устойчивости к рысканию во время маневра рекомендуется использовать пятигосударственное управление ABS. Параметры ABS по умолчанию устанавливаются для работы на дорогах, имеющих:
Сведения о задании поверхности дороги см. в разделе Среда. |
Подсистема активного дифференциального управления генерирует команду дифференциального давления. Чтобы вычислить команду, подсистема имеет эти варианты.
| Вариант | Описание |
|---|---|
| Реализует контроллер, который генерирует команду дифференциального давления на основе:
|
| Не реализует контроллер. Устанавливает для команды дифференциального давления значение 0. |
Подсистема Passenger Vehicle содержит двигатель, контроллеры и кузов транспортного средства с четырьмя колесами. В частности, транспортное средство содержит эти подсистемы.
| Подсистема кузова, подвески, колес | Вариант | Описание |
|---|---|---|
PassVeh7DOF |
| Транспортное средство с четырьмя колесами:
|
PassVeh14DOF |
| Транспортное средство с четырьмя колесами.
|
| Подсистема двигателя | Вариант | Описание |
|---|---|---|
Сопоставленный механизм |
| Картированный двигатель искрового зажигания (SI) |
Регулирование, передача, карданная передача и подсистема тормозов | Вариант | Описание | |
|---|---|---|---|
Трансмиссия идеальная фиксированная передача | Модель трансмиссии | All Wheel Drive | Сконфигурируйте трансмиссию для полного, переднего, заднего или заднего активного дифференциального привода и укажите тип крутящей муфты. |
| |||
| |||
| |||
Передача |
| Реализует идеальную передачу с фиксированной передачей. | |
Гидравлика тормозов | НА | Реализует эвристическую реакцию гидравлической системы при применении контроллером команды торможения к цилиндру. Включает коэффициенты смещения переднего и заднего колес. Подсистема преобразует приложенное давление в положение катушки цилиндра. Для создания тормозного давления золотник подает поток вниз по потоку на цилиндры. | |
При выполнении моделирования подсистема визуализации предоставляет информацию о водителе, транспортном средстве и ответе. Эталонное приложение регистрирует сигналы транспортного средства во время маневра, включая рулевое управление, скорость транспортного средства и двигателя и боковое ускорение. Для импорта зарегистрированных сигналов и проверки данных можно использовать инспектор данных моделирования.
| Элемент | Описание |
|---|---|
Команды драйвера | Команды драйвера:
|
Реакция транспортного средства | Реакция транспортного средства:
|
Блок управления, Velocity, Lat Accel Scope |
|
Плоттер XY транспортного средства | Продольное и боковое расстояние транспортного средства |
ISO 15037-1: 2006 блок | Отображение стандартных сигналов измерений ISO в инспекторе данных моделирования, включая угол и крутящий момент рулевого колеса, продольную и боковую скорость, а также угол бокового скольжения |
Если включить визуализацию 3D блоке Генератор привязок (Reference Generator) 3D вкладке Двигатель (Engine), выбрав Включено (Enabled), можно просмотреть ответ транспортного средства в AutoVrtlEnv окно.
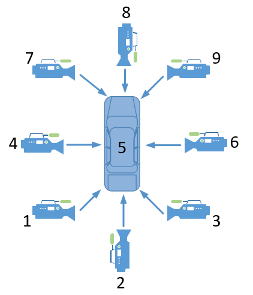
Для плавного изменения вида камеры используйте следующие ключевые команды.
| Ключ | Просмотр камеры | |
|---|---|---|
1 | Задняя левая |
|
2 | Назад | |
3 | Назад направо | |
4 | Левый | |
5 | Внутренний | |
6 | Правильно | |
7 | Спереди слева | |
8 | Фронт | |
9 | Спереди справа | |
0 | Наверху | |
Для дополнительных элементов управления камеры используйте следующие ключевые команды.
| Ключ | Управление камерой |
|---|---|
| Счет | Циклический просмотр между всеми транспортными средствами в сцене. |
Колесо прокрутки мыши | Управление расстоянием камеры от транспортного средства. |
L | Включение или отключение эффекта запаздывания камеры. При включении эффекта запаздывания вид камеры включает:
Это отставание позволяет улучшить визуализацию общего ускорения и вращения транспортного средства. |
| F | Включение или выключение режима свободной камеры. При включении режима свободной камеры можно с помощью мыши изменить шаг и рыскание камеры. Этот режим позволяет вращать камеру вокруг аппарата. |
[1] Пасильяс-Лепине, Уильям. «Гибридное моделирование и анализ предельного цикла для класса пятифазных антиблокировочных алгоритмов торможения». Динамика системы транспортных средств 44, № 2 (2006): 173-188.
[2] Жерар, Матье, Вильям Пасильяс-Лепен, Эдвин Де Врис и Мишель Верхеген. «Улучшения пятифазного алгоритма ABS для экспериментальной проверки». Динамика системы транспортного средства 50, № 10 (2012): 1585-1611.
[3] Бош, Р. «Bosch Automotive Handbook». 10-е ред. Уоррендейл, PA: SAE International, 2018.
[4] J299_200901. Процедура испытания тормозного пути. Уоррендейл, Пенсильвания: SAE International, 2009.
[5] ISO 21994:2007. Пассажирские вагоны - тормозной путь при прямолинейном торможении с использованием ABS - метод испытания с разомкнутым контуром. Женева: ИСО, 2007 год.
[6] ISO 14512:1999. Легковые автомобили - Прямое торможение на поверхностях с коэффициентом трения - Процедура испытания с разомкнутым контуром. Женева: ИСО, 2007 год.
3D Двигатель | Трение на дорожном пути | Опорный генератор прямого маневра