Корневой годограф динамической системы
rlocus( вычисляет и строит график корневого годографа модели SISO sys)sys. Корневой годограф возвращает траектории полюса с обратной связью как функцию усиления обратной связи k (при условии отрицательной обратной связи). Корневые годографы используются для изучения эффектов изменения коэффициентов усиления обратной связи на местах полюса с обратной связью. В свою очередь, эти местоположения обеспечивают косвенную информацию о временных и частотных характеристиках.
Можно использовать rlocus для построения корневого годографа схемы любого из следующих циклов отрицательной обратной связи путем установки sys как показано ниже:
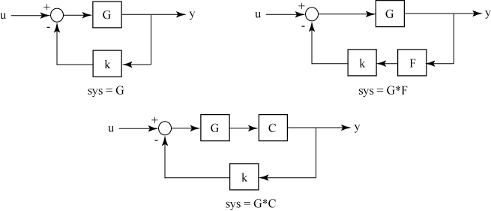
Для образца, если sys является передаточной функцией, представленной
полюса с обратной связью являются корнями
Корневой годограф изображает траектории полюсов с обратной связью, когда коэффициент усиления с обратной связью k изменяется от 0 до бесконечности. rlocus адаптивно выбирает набор положительных усилений k для создания плавного графика. Полюса на корневом локусном графике обозначены x и нули обозначаются o.
rlocus(sys1,sys2,...) строит графики корневых годографов нескольких моделей LTI sys1, sys2,... на одном графике. Для каждой модели можно задать цвет, стиль линии и маркер. Для получения еще большего количества параметров индивидуальной настройки графика см. rlocusplot.
Для этого примера. постройте график корневого годографа следующей динамической системы SISO:
sys = tf([2 5 1],[1 2 3]); rlocus(sys)

Полюса системы обозначены x, в то время как нули обозначаются o на корневой годограф графике. Можно использовать меню в сгенерированном корневом годографе для добавления линий сетки, масштабирования или уменьшения, а также вызвать Property Editor для настройки графика.
Для получения дополнительных опций индивидуальной настройки графика используйте rlocusplot.
В данном примере рассмотрим sisoModels.mat который содержит следующие три модели SISO:
sys1 модель передаточной функции
sys2 модель пространства состояний
sys3 модель с нулями , полюса и усиления
Загрузите модели из mat файл.
load('sisoModels.mat','sys1','sys2','sys3');
Создайте корневой годограф с помощью rlocus и укажите цвет для каждой системы. Также добавьте легенду к корневому годографу графику.
rlocus(sys1,'b',sys2,'k',sys3,'r') hold on legend('sys1','sys2','sys3') hold off

Рисунок содержит корневые локусные схемы для всех трех систем на одном графике. Для получения дополнительной индивидуальной настройки графика смотрите rlocusplot.
В данном примере рассмотрите следующую модель передаточной функции SISO:
Используйте вышеописанную модель передаточной функции с rlocus для извлечения полюсов с обратной связью и соответствующих значений усиления обратной связи.
sys = tf([3 1],[9 7 5 6]); [r,k] = rlocus(sys)
r = 3×53 complex
-0.9406 + 0.0000i -0.8744 + 0.0000i -0.8685 + 0.0000i -0.8620 + 0.0000i -0.8550 + 0.0000i -0.8475 + 0.0000i -0.8394 + 0.0000i -0.8306 + 0.0000i -0.8212 + 0.0000i -0.8111 + 0.0000i -0.8003 + 0.0000i -0.7888 + 0.0000i -0.7766 + 0.0000i -0.7636 + 0.0000i -0.7500 + 0.0000i -0.7358 + 0.0000i -0.7209 + 0.0000i -0.7055 + 0.0000i -0.6896 + 0.0000i -0.6734 + 0.0000i -0.6569 + 0.0000i -0.6402 + 0.0000i -0.6236 + 0.0000i -0.6071 + 0.0000i -0.5908 + 0.0000i -0.5748 + 0.0000i -0.5593 + 0.0000i -0.5443 + 0.0000i -0.5299 + 0.0000i -0.5161 + 0.0000i -0.5030 + 0.0000i -0.4906 + 0.0000i -0.4789 + 0.0000i -0.4679 + 0.0000i -0.4576 + 0.0000i -0.4480 + 0.0000i -0.4390 + 0.0000i -0.4306 + 0.0000i -0.4229 + 0.0000i -0.4157 + 0.0000i -0.4090 + 0.0000i -0.4029 + 0.0000i -0.3972 + 0.0000i -0.3919 + 0.0000i -0.3871 + 0.0000i -0.3826 + 0.0000i -0.3785 + 0.0000i -0.3748 + 0.0000i -0.3713 + 0.0000i -0.3681 + 0.0000i
0.0814 + 0.8379i 0.0483 + 0.9140i 0.0453 + 0.9212i 0.0421 + 0.9291i 0.0386 + 0.9377i 0.0349 + 0.9470i 0.0308 + 0.9573i 0.0264 + 0.9686i 0.0217 + 0.9809i 0.0167 + 0.9943i 0.0113 + 1.0090i 0.0055 + 1.0251i -0.0006 + 1.0426i -0.0071 + 1.0617i -0.0139 + 1.0826i -0.0210 + 1.1053i -0.0284 + 1.1300i -0.0362 + 1.1568i -0.0441 + 1.1859i -0.0522 + 1.2175i -0.0605 + 1.2515i -0.0688 + 1.2883i -0.0771 + 1.3278i -0.0853 + 1.3703i -0.0935 + 1.4158i -0.1015 + 1.4644i -0.1092 + 1.5162i -0.1167 + 1.5714i -0.1239 + 1.6299i -0.1308 + 1.6920i -0.1374 + 1.7578i -0.1436 + 1.8273i -0.1494 + 1.9006i -0.1549 + 1.9780i -0.1601 + 2.0594i -0.1649 + 2.1452i -0.1694 + 2.2354i -0.1736 + 2.3302i -0.1775 + 2.4299i -0.1810 + 2.5345i -0.1844 + 2.6442i -0.1875 + 2.7594i -0.1903 + 2.8802i -0.1929 + 3.0069i -0.1953 + 3.1397i -0.1976 + 3.2789i -0.1996 + 3.4247i -0.2015 + 3.5775i -0.2032 + 3.7375i -0.2048 + 3.9052i
0.0814 - 0.8379i 0.0483 - 0.9140i 0.0453 - 0.9212i 0.0421 - 0.9291i 0.0386 - 0.9377i 0.0349 - 0.9470i 0.0308 - 0.9573i 0.0264 - 0.9686i 0.0217 - 0.9809i 0.0167 - 0.9943i 0.0113 - 1.0090i 0.0055 - 1.0251i -0.0006 - 1.0426i -0.0071 - 1.0617i -0.0139 - 1.0826i -0.0210 - 1.1053i -0.0284 - 1.1300i -0.0362 - 1.1568i -0.0441 - 1.1859i -0.0522 - 1.2175i -0.0605 - 1.2515i -0.0688 - 1.2883i -0.0771 - 1.3278i -0.0853 - 1.3703i -0.0935 - 1.4158i -0.1015 - 1.4644i -0.1092 - 1.5162i -0.1167 - 1.5714i -0.1239 - 1.6299i -0.1308 - 1.6920i -0.1374 - 1.7578i -0.1436 - 1.8273i -0.1494 - 1.9006i -0.1549 - 1.9780i -0.1601 - 2.0594i -0.1649 - 2.1452i -0.1694 - 2.2354i -0.1736 - 2.3302i -0.1775 - 2.4299i -0.1810 - 2.5345i -0.1844 - 2.6442i -0.1875 - 2.7594i -0.1903 - 2.8802i -0.1929 - 3.0069i -0.1953 - 3.1397i -0.1976 - 3.2789i -0.1996 - 3.4247i -0.2015 - 3.5775i -0.2032 - 3.7375i -0.2048 - 3.9052i
k = 1×53
104 ×
0 0.0001 0.0001 0.0001 0.0001 0.0001 0.0001 0.0001 0.0001 0.0001 0.0001 0.0001 0.0002 0.0002 0.0002 0.0002 0.0002 0.0003 0.0003 0.0003 0.0003 0.0004 0.0004 0.0004 0.0005 0.0005 0.0006 0.0006 0.0007 0.0007 0.0008 0.0009 0.0010 0.0011 0.0012 0.0013 0.0014 0.0015 0.0017 0.0018 0.0020 0.0022 0.0024 0.0026 0.0028 0.0031 0.0034 0.0037 0.0041 0.0045
Начиная с sys содержит 3 полюса, размер результирующего массива полюсов r 3x53. Каждый столбец в r соответствует значению усиления от вектора k. В данном примере rlocus автоматически выбрано 53 значения k от нуля до бесконечности, чтобы получить гладкую траекторию для трех полюсов с обратной связью.
display(r(:,39))
-0.4229 + 0.0000i -0.1775 + 2.4299i -0.1775 - 2.4299i
display(k(39))
16.5907
Для образца, r(:,39) содержит указанные выше полюсы с обратной связью для значения усиления с обратной связью 16.5907.
В данном примере рассмотрите следующую модель передаточной функции SISO:
Задайте модель передаточной функции и необходимый вектор значений усиления обратной связи. В данном примере рассмотрим набор значений усиления, варьирующихся от 1 до 8 с шагами 0,5 и извлечем положения полюса с обратной связью с помощью rlocus.
sys = tf([0.5 -1],[4 0 3 0 2]); k = (1:0.5:5); r = rlocus(sys,k); size(r)
ans = 1×2
4 9
Начиная с sys содержит 4 полюса с обратной связью, размер результирующего массива положений с обратной связью r является 4x9, где 9 столбцов соответствуют 9 конкретным значениям усиления, заданным в k.
Можно также визуализировать траекторию полюсов с обратной связью для конкретных значений усиления в k на корневой годограф графике.
rlocus(sys,k)

Интерактивный подход к графическому изображению корневых годографов см. в Control System Designer.
Control System Designer | pole | rlocusplot | ss | tf | zero | zpk
