Пакет: TuningGoal
Форма целевого цикла для настройки системы управления
Использование TuningGoal.LoopShape задать целевую gain profile (коэффициент усиления как функцию от частоты) разомкнутый контур характеристики. TuningGoal.LoopShape ограничивает разомкнутый контур, ответ «точка-точка» (L) в заданном месте в системе управления. Используйте эту цель настройки для настройки системы управления с помощью команд настройки, таких как systune или looptune.
Когда вы настраиваете систему управления, целевой профиль усиления разомкнутого контура преобразуется в ограничения на функцию обратной чувствительности inv (S) = (I + L) и дополнительную функцию чувствительности T = 1- S. Эти ограничения проиллюстрированы для репрезентативной настроенной системы на следующем рисунке.
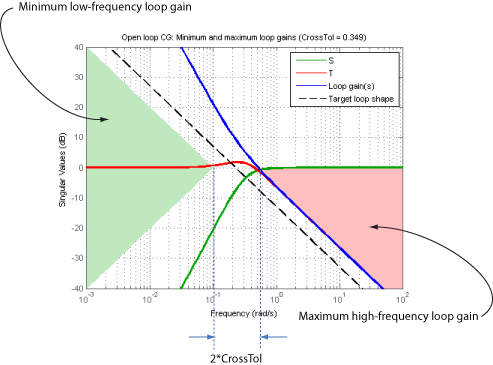
Там, где L намного больше 1, ограничение минимального усиления на inv (S) (зеленая затененная область) эквивалентно ограничению минимального усиления на L. Точно так же, когда L намного меньше 1, ограничение максимального усиления на T (красная затененная область) эквивалентно ограничению максимального усиления на L. Погрешность между этими двумя ограничениями в два раза больше CrossTol параметр, который задает полосу частот, где коэффициент усиления цикла может пересекать 0 дБ.
Для систем управления с несколькими входами и мультивыходами (MIMO) значения в профиле усиления, больше 1, интерпретируются как минимальные требования к эффективности. Такие значения являются нижними границами наименьшего сингулярного значения разомкнутого контура. Значения профиля усиления меньше единицы интерпретируются как минимальные требования к откату, которые являются верхними границами наибольшего сингулярного значения отклика без разомкнутого контура. Для получения дополнительной информации о сингулярных значениях см. sigma.
Использование TuningGoal.LoopShape когда форма цикла рядом с перекрестием проста или хорошо понятна (например, интегральное действие). Чтобы задать только ограничения высокого усиления или низкого усиления в определенных полосах, используйте TuningGoal.MinLoopGain и TuningGoal.MaxLoopGain. Когда вы делаете это, программное обеспечение определяет лучшую форму цикла рядом с перекрестием.
Req =
TuningGoal.LoopShape(location,loopgain)loopgain задает целевой профиль усиления без разомкнутого контура. Можно задать целевой профиль усиления (максимальное усиление через пару ввода-вывода) как плавную передаточную функцию или нарисовать кусочно- ошибку профиль с помощью frd модель.
Req = TuningGoal.LoopShape(location,loopgain,crosstol)crosstol выражает допуск на протяжении десятилетий. Для примера, crosstol = 0,5 позволяет кроссоверам усилений в течение полудесяца с каждой стороны целевой частоты среза, заданной loopgain. Когда опускаешь crosstol, цель настройки использует значение по умолчанию 0,1 десятилетия. Можно увеличить crosstol при настройке систем управления MIMO. Это позволяет более широко изменять частоты среза для различных циклов в системе.
Req = TuningGoal.LoopShape( задает только целевую частоту среза коэффициента усиления. Этот синтаксис эквивалентен установке чистой формы цикла интегратора, location,wc)loopgain = wc/s.
Req = TuningGoal.LoopShape( задает область значений для целевой частоты среза коэффициента усиления. Область значений является вектором вида location,wcrange)wcrange = [wc1,wc2]. Этот синтаксис эквивалентен использованию среднего геометрического sqrt(wc1*wc2) как wc и настройка crosstol по половинной ширине wcrange через десятилетия. Использование области значений вместо одной wc значение увеличивает способность алгоритма настройки применять форму целевого цикла для всех циклов в системе управления MIMO.
|
Место, где измеряется форма разомкнутого контура отклика, подлежащая ограничению, задается как вектор символов или массив ячеек векторов символов, которые идентифицируют одно или несколько местоположений в системе управления для настройки. Какие локации доступны, зависит от того, какую систему вы настраиваете:
Требование к форме цикла применяется к передаточной функции разомкнутого контура точка-точка в заданном месте. Эта передаточная функция является разомкнутой характеристикой, полученной путем инжектирования сигналов в местоположение и измерения обратных сигналов в той же точке. Если |
|
Целевой профиль усиления разомкнутого контура как функция от частоты. Можно задать Для систем управления с несколькими входами и мультивыходами (MIMO) значения в профиле усиления, больше 1, интерпретируются как минимальные требования к эффективности. Эти значения являются нижними границами наименьшего сингулярного значения Если вы настраиваете в дискретном времени (то есть используя a |
|
Допуск в месте нахождения частоты среза, через десятилетия. задается как скалярное значение. Для примера, По умолчанию: 0.1 |
|
Целевая частота среза, заданный как положительная скалярная величина значение. Экспресс- |
|
Область значений для целевой частоты среза, заданный как вектор вида |
|
Форма целевого цикла как функция от частоты, заданная как SISO Программа автоматически отображает входной параметр |
|
Допуск по частоте среза, через десятилетия. Начальное значение По умолчанию: |
|
Частота полосы в которой применяется цель настройки, задается как вектор-строка формы Установите Req.Focus = [1,100]; По умолчанию: |
|
Требование устойчивости по динамике замкнутого контура, заданное как 1 ( Когда По умолчанию: 1 ( |
|
Переключение для автоматического масштабирования сигналов цикла, заданное как В мультицикл или системы управления MIMO каналы обратной связи автоматически перерассчитываются, чтобы выровнять off-диагональные условия в передаточной функции разомкнутого контура (условия циклического взаимодействия). Задайте По умолчанию: |
|
Местоположение, в котором измеряется форма отклика без разомкнутого контура, которая будет ограничена, задается как массив ячеек из векторов символов, которые идентифицируют одну или несколько точек анализа в системе управления, чтобы настроить. Для примера, если Начальное значение |
|
Модели, к которым применяется цель настройки, заданные как вектор индексов. Используйте Req.Models = 2:4; Когда По умолчанию: |
|
Циклы обратной связи для открытия при оценке цели настройки, заданные как массив ячеек из векторов символов, которые идентифицируют местоположения открытия цикла. Цель настройки оценивается относительно строения разомкнутого контура, созданной открытием циклов обратной связи в идентифицируемых вами местах. Если вы используете цель настройки, чтобы настроить модель Simulink системы управления, то Если вы используете цель настройки, чтобы настроить обобщенное пространство состояний ( Для примера, если По умолчанию: |
|
Имя цели настройки, заданное как вектор символов. Для примера, если Req.Name = 'LoopReq'; По умолчанию: |
Создайте целевое требование к профилю усиления для следующей системы управления. Задайте интегральное действие, перекрещивание усилителя на 1 и требование отката 40 дБ/десятилетие.

Требование должно применяться к разомкнутой реакции, измеренной в AnalysisPoint блочное X. Задайте допуск кроссовера на 0,5 десятилетия.
LS = frd([100 1 0.0001],[0.01 1 100]);
Req = TuningGoal.LoopShape('X',LS,0.5);Программное обеспечение преобразует LS в плавную функцию частоты, которая аппроксимирует кусочно-заданное требование. Просмотрите требование с помощью viewGoal.
viewGoal(Req)

Зеленые и красные области указывают границы обратной чувствительности, inv(S) = 1-G*Cи взаимодополняющая чувствительность, T = 1-S, соответственно. Зазор между этими областями при усилении 0 дБ отражает заданный допуск на перекрещивание, который составляет полдесяти лет по обе стороны от пересечения целевого цикла.
Когда вы используете viewGoal(Req,CL) для проверки настроенной модели замкнутой системы управления, CL, настроенные значения S и T также нанесены на график.
Создайте отдельные требования к форме цикла для внутреннего и внешних контуров следующей системы управления.

Для внутреннего цикла задайте форму цикла с интегральным действием, переключение усилителя на 1 и требование отката 40 дБ/десятилетие. Кроме того, задайте, что это требование к форме цикла должно быть применено при открытом внешнем контуре.
LS2 = frd([100 1 0.0001],[0.01 1 100]); Req2 = TuningGoal.LoopShape('X2',LS2); Req2.Openings = 'X1';
Определение 'X2' для location указывает, что Req2 применяется к точке -к точке разомкнутого контура передаточной функции в местоположении X2. Настройка Req2.Openings указывает, что цикл открыт в точке анализа X1 когда Req2 принудительно.
По умолчанию Req2 налагает требование устойчивости на внутренний цикл, а также требование к форме цикла. Однако в некоторых системах управления устойчивость внутреннего контура может не потребоваться, или может оказаться невозможной. В этом случае снимите требование устойчивости с Req2 следующим образом.
Req2.Stabilize = false;
Для внешнего контура задайте форму цикла с интегральным действием, пересечение усилителя на 0,1 и требование отката 20 дБ/десятилетие.
LS1 = frd([10 1 0.01],[0.01 0.1 10]);
Req1 = TuningGoal.LoopShape('X1',LS1);Определение 'X1' для location указывает, что Req1 применяется к точке -к точке разомкнутого контура передаточной функции в местоположении X1. Вам не нужно устанавливать Req1.Openings поскольку эта форма цикла принудительно закрывается внутренним циклом.
Можно хотеть настроить систему управления с обоими требованиями к формированию цикла Req1 и Req2. Для этого используйте оба требования в качестве входов для команды настройки. Например, предположим CL0 является настраиваемым genss модель системы управления с обратной связью. В этом случае используйте [CL,fSoft] = systune(CL0,[Req1,Req2]) настройка системы управления в соответствии с обоими требованиями.
Создайте требование к форме контура для цикла обратной связи на 'q' в модели Simulink rct_airframe2. Задайте, что требование к форме контура принудительно выполняется с помощью 'az' цикл разомкнут.
Откройте модель.
open_system('rct_airframe2')

Создайте требование к форме цикла, которое обеспечивает интегральное действие с перекрестием 2 рад/с для 'q' цикл. Эта форма цикла соответствует форме цикла 2/_s_.
s = tf('s'); shape = 2/s; Req = TuningGoal.LoopShape('q',shape);
Укажите место, в котором можно открыть дополнительный цикл при выполнении требования.
Req.Openings = 'az';
Чтобы использовать это требование для настройки модели Simulink, создайте slTuner интерфейс с моделью. Идентифицируйте блок для настройки в интерфейсе.
ST0 = slTuner('rct_airframe2','MIMO Controller');
Обозначить обе az и q как точки анализа в slTuner интерфейс.
addPoint(ST0,{'az','q'});
Эта команда делает q доступно как место анализа. Это также позволяет применять требование настройки, при этом цикл открыт на az.
Теперь можно настроить модель, используя Req и любые другие требования к настройке. Для примера:
[ST,fSoft] = systune(ST0,Req);
Final: Soft = 0.845, Hard = -Inf, Iterations = 51
Создайте требование настройки, указывающее, что реакция разомкнутого контура идентифицируется 'X' кросс-единица усиления между 50 и 100 рад/с.
Req = TuningGoal.LoopShape('X',[50,100]);Исследуйте получившееся требование, чтобы увидеть форму целевого цикла.
viewGoal(Req)

Этот график показывает, что требование задает интегральную форму цикла с перекрестием вокруг 70 рад/с, геометрического среднего значения области значений [50 100]. Зазор на 0 дБ между минимальным усилением низкой частоты (зеленая область) и максимальным усилением высокой частоты (красная область) отражает допустимую область значений пересечения [50 100].
Эта цель настройки накладывает неявное ограничение устойчивости на функцию чувствительности с обратной связью, измеренную в Location, оцениваемый с циклами, открытыми в точках, идентифицированных в Openings. Динамика, на которую влияет это неявное ограничение, является stabilized dynamics для этой цели настройки. The MinDecay и MaxRadius опции systuneOptions управляйте границами этой неявно ограниченной динамики. Если оптимизация не соответствует границам по умолчанию или если границы по умолчанию конфликтуют с другими требованиями, используйте systuneOptions для изменения этих значений по умолчанию.
Когда вы настраиваете систему управления, используя TuningGoalпрограммное обеспечение преобразует цель настройки в нормированное скалярное значение f (x), где x является вектором свободных (настраиваемых) параметров в системе управления. Затем программа настраивает значения параметров, чтобы минимизировать f (x) или привести f (x) ниже 1, если цель настройки является жестким ограничением.
Для TuningGoal.LoopShape, f (x) определяется:
Здесь S = D–1[I – L (s, x)]–1D - это масштабированная функция чувствительности в заданном местоположении, где L (s, x) - это формируемая разомкнутым контуром реакция. D является автоматически вычисляемым коэффициентом масштабирования цикла. (Если LoopScaling для свойства задано значение 'off', затем D = I.) T = S - I является дополнительной функцией чувствительности.
WS и WT являются функциями взвешивания частот, выведенными из заданной формы цикла. Усиления этих функций примерно совпадают LoopGain и 1/LoopGain, для значений в диапазоне от -20 дБ до 60 дБ. По числовым причинам функции взвешивания выравниваются вне этой области значений, если заданный профиль усиления цикла не изменяет наклон для коэффициентов усиления выше 60 дБ или ниже -60 дБ. Потому что полюсы WS или WT близки к s = 0 или s = Inf может привести к плохому числовому обусловлению systune задача оптимизации, не рекомендуется задавать цикл формы с очень низкочастотной или очень высокочастотной динамикой.
Для получения WS и WT используйте:
[WS,WT] = getWeights(Req,Ts)
где Req является целью настройки, и Ts - шаг расчета, в который вы настраиваете (Ts = 0 на непрерывное время). Для получения дополнительной информации о эффектах функций взвешивания на числовую стабильность, смотрите Визуализация целей настройки.
frd | looptune | systune | TuningGoal.Gain | TuningGoal.MaxLoopGain | TuningGoal.MinLoopGain | TuningGoal.Tracking | viewGoal | looptune
(for slTuner) (Simulink Control Design) | slTuner (Simulink Control Design) | systune (for slTuner) (Simulink Control Design)
