Модель датчика камеры с объективом в 3D среду симуляции
Automated Driving Toolbox/ 3D
Блок Simulation 3D Camera обеспечивает интерфейс к камере с объективом в 3D среде симуляции. Это окружение визуализируется с помощью Unreal Engine® из эпических игр®. Датчик основан на идеальной модели pinhole-камеры, с добавлением объектива, чтобы представлять полную модель камеры, включая искажение объектива. Эта модель камеры поддерживает поле зрения до 150 степеней. Для получения дополнительной информации см. «Алгоритмы».
Если вы задаете Sample time -1, блок использует шаг расчета, заданный в блоке Simulation 3D Scene Configuration. Чтобы использовать этот датчик, вы должны включить блок Simulation 3D Scene Configuration в свою модель.
Блок выводит изображения, полученные камерой во время симуляции. Можно использовать эти изображения для визуализации и проверки алгоритмов вождения. Кроме сложения, на вкладке Ground Truth можно выбрать опции для вывода достоверных данных для разработки алгоритмов оценки глубины и семантической сегментации. Можно также вывести местоположение и ориентацию камеры в мировой системе координат сцены. На изображении показан блок с включенными всеми портами.
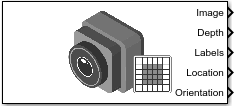
В таблице перечислены порты и способы их включения.
| Порт | Описание | Параметр для включения порта | Образец визуализации |
|---|---|---|---|
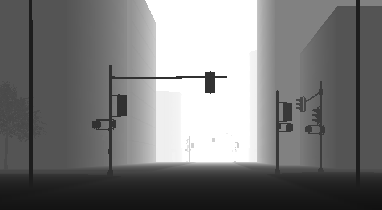
Image | Выводит изображение RGB, захваченное камерой | n/a |
|
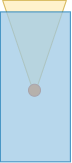
Depth | Выводит карту глубин со значениями от 0 м до 1000 метров | Output depth |
|
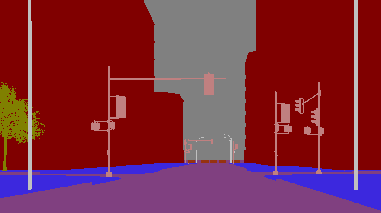
Labels | Выводит семантическую карту сегментации идентификаторов меток, которые соответствуют объектам в сцене | Output semantic segmentation |
|
Location | Вывод местоположения камеры в мировой системе координат | Output location (m) and orientation (rad) | n/a |
Orientation | Вывод ориентации камеры в мировой системе координат | Output location (m) and orientation (rad) | n/a |
Примечание
Блок Simulation 3D Scene Configuration должен выполняться перед блоком Simulation 3D Camera. Таким образом, окружение визуализации 3D Unreal Engine подготавливает данные до того, как блок Simulation 3D Camera получит их. Чтобы проверить порядок выполнения блока, щелкните правой кнопкой мыши блоки и выберите Properties. На вкладке General подтвердите следующие Priority настройки:
Simulation 3D Scene Configuration — 0
Simulation 3D Camera — 1
Для получения дополнительной информации о порядке выполнения смотрите Как работает нереальная симуляция Engine для автоматического вождения.
Sensor identifier - Уникальный идентификатор датчика1 (по умолчанию) | положительное целое числоУникальный идентификатор датчика, заданный как положительное целое число. В мультисенсорной системе идентификатор датчика различает датчики. Когда вы добавляете новый блок датчика к модели, Sensor identifier этого блока равен N + 1. N является самым высоким значением Sensor identifier среди существующих блоков датчиков в модели.
Пример: 2
Parent name - Имя родительского элемента, на котором установлен датчикScene Origin (по умолчанию) | имя транспортного средстваИмя родительского элемента, на котором установлен датчик, указывается как Scene Origin или как имя транспортного средства в вашей модели. Имена транспортных средств, которые можно выбрать, соответствуют параметрам Name блоков Simulation 3D Vehicle with Ground Following в вашей модели. Если вы выбираете Scene Originблок помещает датчик в источник сцены.
Пример: SimulinkVehicle1
Mounting location - Место установки датчикаOrigin (по умолчанию) | Front bumper | Rear bumper | Right mirror | Left mirror | Rearview mirror | Hood center | Roof centerМесто установки датчика.
Когда Parent name Scene Originблок устанавливает датчик в источник сцены. Можно задать Mounting location значение Origin только. Во время симуляции датчик остается стационарным.
Когда Parent name - имя транспортного средства (для примера, SimulinkVehicle1) блок устанавливает датчик в одно из предопределенных мест установки, описанных в таблице. Во время симуляции датчик перемещается вместе с транспортным средством.
| Место установки транспортного средства | Описание | Ориентация относительно источника транспортного средства [крен, тангаж, рыскание] (град.) |
|---|---|---|
Origin | Передний датчик, установленный на источнике транспортного средства, который находится на земле, в геометрическом центре транспортного средства (см. Системы координат для нереальной симуляции Engine в Automated Driving Toolbox)
| [0, 0, 0] |
Front bumper | Передний датчик, установленный на переднем бампере
| [0, 0, 0] |
Rear bumper | Обращенный назад датчик, установленный на заднем бампере
| [0, 0, 180] |
Right mirror | Обращенный вниз датчик, установленный на правом боковом зеркале
| [0, –90, 0] |
Left mirror | Обращенный вниз датчик, установленный на левом боковом зеркале
| [0, –90, 0] |
Rearview mirror | Передний датчик, установленный на зеркале заднего вида, внутри транспортного средства
| [0, 0, 0] |
Hood center | Передний датчик, установленный на центре капота
| [0, 0, 0] |
Roof center | Передний датчик, установленный на центре крыши
| [0, 0, 0] |
Крен, тангаж и рыскание положительны по часовой стрелке при взгляде в положительном направлении оси X, оси Y и оси Z, соответственно. При взгляде на транспортное средство от верхней части вниз угол рыскания (то есть угол ориентации) против часовой стрелки-положительный, потому что вы смотрите в отрицательном направлении оси.
Расположение датчика (X, Y, Z) относительно транспортного средства зависит от типа транспортного средства. Чтобы указать тип транспортного средства, используйте параметр Type блока Simulation 3D Vehicle with Ground Following, к которому вы монтируете датчик. Чтобы получить места установки (X, Y, Z) для типа транспортного средства, смотрите страницу с описанием для этого транспортного средства.
Чтобы определить местоположение датчика в мировых координатах, откройте блок датчика. Затем на вкладке Ground Truth выберите Output location (m) and orientation (rad) и проверьте данные из Location выходного порта.
Specify offset - Задайте смещение от места установкиoff (по умолчанию) | onВыберите этот параметр, чтобы задать смещение от места установки с помощью параметров Relative translation [X, Y, Z] (m) и Relative rotation [Roll, Pitch, Yaw] (deg).
Relative translation [X, Y, Z] (m) - Смещение перемещения относительно места установки[0, 0, 0] (по умолчанию) | вектор 1 на 3 с реальным значениемСмещение перемещения относительно места установки датчика, заданное как действительный вектор 1 на 3 вида [X, Y, Z]. Модули измерения указаны в метрах.
Если вы монтируете датчик к транспортному средству путем установки Parent name на имя этого транспортного средства, то X, Y и Z находятся в транспортном средстве системе координат, где:
Ось X указывает вперед от транспортного средства.
Ось Y указывает налево от транспортного средства, если смотреть в прямом направлении транспортного средства.
Ось Z указывает вверх.
Это источник - место установки, заданное в параметре Mounting location. Этот источник отличается от источника транспортного средства, который является геометрическим центром транспортного средства.
Если вы монтируете датчик к источнику сцены путем установки Parent name на Scene Origin, тогда X, Y и Z находятся в мировых координатах сцены.
Для получения дополнительной информации о транспортном средстве и мировых системах координат смотрите Системы координат для Unreal Engine Simulation в Automated Driving Toolbox.
Пример: [0,0,0.01]
Чтобы включить этот параметр, выберите Specify offset.
Relative rotation [Roll, Pitch, Yaw] (deg) - Смещение вращения относительно места установки[0, 0, 0] (по умолчанию) | вектор 1 на 3 с реальным значениемВращательное смещение относительно места установки датчика, заданное как действительный вектор 1 на 3 вида [Roll, тангаж, рыскание]. Крен, тангаж и рыскание являются углами вращения вокруг осей X -, Y- и Z, соответственно. Модули указаны в степенях.
Если вы монтируете датчик к транспортному средству путем установки Parent name на имя этого транспортного средства, то X, Y и Z находятся в транспортном средстве системе координат, где:
Ось X указывает вперед от транспортного средства.
Ось Y указывает налево от транспортного средства, если смотреть в прямом направлении транспортного средства.
Ось Z указывает вверх.
Крен, тангаж и рыскание положительны по часовой стрелке при взгляде в прямом направлении оси X, оси Y и оси Z, соответственно. Если вы просматриваете сцену с 2D перспективы сверху вниз, то угол рыскания (также называемый углом ориентации) будет противоположно часовой стрелке-положителен, потому что вы просматриваете сцену в отрицательном направлении оси Z.
Это источник - место установки, заданное в параметре Mounting location. Этот источник отличается от источника транспортного средства, который является геометрическим центром транспортного средства.
Если вы монтируете датчик к источнику сцены путем установки Parent name на Scene Origin, тогда X, Y и Z находятся в мировых координатах сцены.
Для получения дополнительной информации о транспортном средстве и мировых системах координат смотрите Системы координат для Unreal Engine Simulation в Automated Driving Toolbox.
Пример: [0,0,10]
Чтобы включить этот параметр, выберите Specify offset.
Sample time - Шаг расчета-1 (по умолчанию) | положительная скалярная величинаШаг расчета блока в секундах, заданная как положительная скалярная величина. Частота систем координат среды симуляции 3D является обратной частотой шага расчета.
Если вы задаете значение шага расчета -1блок наследует свои шаги расчета от блока Simulation 3D Scene Configuration.
Эти собственные параметры камеры эквивалентны свойствам cameraIntrinsics объект. Чтобы получить собственные параметры для камеры, используйте приложение Camera Calibrator.
Для получения дополнительной информации о процессе калибровки камеры см. Приложение Single Camera Calibrator и Что такое калибровка камеры?.
Focal length (pixels) - Фокусное расстояние камеры[1109, 1109] (по умолчанию) | положительный целочисленный вектор 1 на 2Фокусное расстояние камеры, заданное как положительный целочисленный вектор 1 на 2 вида [fx, fy]. Модули указаны в пикселях.
fx = <reservedrangesplaceholder1> × <reservedrangesplaceholder0>
fy = <reservedrangesplaceholder1> × <reservedrangesplaceholder0>
где:
F - фокусное расстояние в мировых единицах измерения, обычно миллиметрах.
[sx, sy] - количество пикселей на мировую единицу измерения в x и y направлении, соответственно.
Этот параметр эквивалентен FocalLength свойство cameraIntrinsics объект.
Optical center (pixels) - Оптический центр камеры[640, 360] (по умолчанию) | положительный целочисленный вектор 1 на 2Оптический центр камеры, заданный как положительный целочисленный вектор 1 на 2 вида [cx, cy]. Модули указаны в пикселях.
Этот параметр эквивалентен PrincipalPoint свойство cameraIntrinsics объект.
Image size (pixels) - Размер изображения, произведенного камерой[720, 1280] (по умолчанию) | положительный целочисленный вектор 1 на 2Размер изображения, произведенного камерой, задается как положительный целочисленный вектор 1 на 2 вида [mrows, ncols]. Модули указаны в пикселях.
Этот параметр эквивалентен ImageSize свойство cameraIntrinsics объект.
Radial distortion coefficients - Коэффициенты радиального искажения[0, 0] (по умолчанию) | вещественный неотрицательный вектор 1 на 2 | действительный неотрицательный вектор 1 на 3Коэффициенты радиального искажения, заданные как вещественный неотрицательный вектор 1 на 2 или 1 на 3. Радиальное искажение происходит, когда световые лучи изгибаются больше, чем ребра линзы, чем в ее оптическом центре. Искажение больше, когда линза меньше. Блок вычисляет радиально-искаженное положение точки. Модули безразмерны.
Этот параметр эквивалентен RadialDistortion свойство cameraIntrinsics объект.
Tangential distortion coefficients - Коэффициенты тангенциального искажения[0, 0] (по умолчанию) | вещественный неотрицательный вектор 1 на 2Коэффициенты тангенциального искажения, заданные как вещественный неотрицательный вектор 1 на 2. Тангенциальное искажение происходит, когда линза и плоскость изображения не параллельны. Координаты выражены в мировых единицах измерения. Модули безразмерны.
Этот параметр эквивалентен TangentialDistortion свойство cameraIntrinsics объект.
Axis skew - Угол наклона осей камеры0 (по умолчанию) | неотрицательной скаляромУгол наклона осей камеры, заданный как неотрицательный скаляр. Если ось X и ось Y в точности перпендикулярны, то перекос должен быть 0. Модули безразмерны.
Этот параметр эквивалентен Skew свойство cameraIntrinsics объект.
Output depth - Выход выходных глубинoff (по умолчанию) | onВыберите этот параметр, чтобы вывести карту глубины в Depth порт.
Output semantic segmentation - Выводит семантическую карту сегментации идентификаторов метокoff (по умолчанию) | onВыберите этот параметр, чтобы вывести семантическую карту сегментации идентификаторов меток в Labels порту.
Output location (m) and orientation (rad) - Выходное расположение и ориентация датчикаoff (по умолчанию) | onВыберите этот параметр, чтобы вывести положение и ориентацию датчика в портах Location и Orientation, соответственно.
Чтобы визуализировать изображения камеры, которые выводятся портом Image, используйте Video Viewer или To Video Display блок.
Чтобы узнать, как визуализировать карты глубины и семантической сегментации, которые выводятся портами Depth и Labels, смотрите пример визуализации глубины и семантической сегментации с использованием Unreal Engine Simulation.
Поскольку Unreal Engine может занять много времени, чтобы начать между симуляциями, рассмотрите логгирование сигналов, которые выводят датчики. Затем можно использовать эти данные для разработки алгоритмов восприятия в MATLAB®. См. «Конфигурирование сигнала для логгирования» (Simulink).
Можно также сохранить данные изображения как видео при помощи блока To Multimedia File. Для примера этой настройки смотрите Design Lane Marker Detector Using Unreal Engine Simulation Environment.
Блок использует модель камеры, предложенную Жаном-Ивом Буге [1]. Модель включает в себя:
Модель камеры pinhole не учитывает искажения объектива, потому что идеальная камера pinhole не имеет объектива. Чтобы точно представлять реальную камеру, полная модель камеры, используемая блоком, включает радиальное и тангенциальное искажение объектива.
Для получения дополнительной информации смотрите Что такое калибровка камеры?
[1] Bouguet, J. Y. Camera Calibration Toolbox for Matlab. http://www.vision.caltech.edu/bouguetj/calib_doc
[2] Чжан, З. «Гибкий новый техник калибровки камеры». Транзакции IEEE по шаблонному анализу и машинному анализу. Том 22, № 11, 2000, стр. 1330-1334.
[3] Heikkila, J., and O. Silven. «Четырехэтапная процедура калибровки камеры с неявной коррекцией изображения». Международная конференция IEEE по компьютерному зрению и распознаванию шаблонов. 1997.