Automated Driving Toolbox™ предоставляет среду совместного моделирования, которая моделирует алгоритмы вождения в Simulink® и визуализирует их эффективность в виртуальной среде симуляции. Это окружение использует Unreal Engine® из эпических игр®.
Блоки Simulink, относящиеся к среде симуляции, можно найти в библиотеке блоков Automated Driving Toolbox > Simulation 3D. Эти блоки обеспечивают возможность:
Сконфигурируйте сцены в среде симуляции.
Разместите и перемещайте транспортные средства в этих сценах.
Установите датчики камеры, радара и лидара на транспортных средствах.
Симулируйте выходы датчика на основе окружения вокруг транспортного средства.
Получите достоверные данные для семантической сегментации и информации о глубине.
Этот инструмент симуляции обычно используется, чтобы дополнить реальные данные при разработке, тестировании и проверке эффективности автоматизированных алгоритмов вождения. В сочетании с моделью транспортного средства можно использовать эти блоки для выполнения реалистичных симуляций замкнутой системы, которое охватывает весь беспилотный стек, от восприятия до управления.
Для получения дополнительной информации о среде симуляции см. «Как работает Unreal Engine Simulation for Automated Driving».
Для доступа к библиотеке Automated Driving Toolbox > Simulation 3D в MATLAB® в командной строке введите drivingsim3d.
Чтобы сконфигурировать модель для совместного моделирования со средой симуляции, добавьте блок Simulation 3D Scene Configuration к модели. Используя этот блок, вы можете выбрать из набора предварительно построенных сцен, где можно протестировать и визуализировать свои алгоритмы вождения. Можно также использовать этот блок для управления положением солнца и погодными условиями в сцене. Следующее изображение относится к сцене Virtual Mcity.

Тулбокс включает эти сцены.
| Сцена | Описание |
|---|---|
| Straight Road | Сегмент прямой дороги |
| Изогнутая дорога | Изогнутая, закольцованная дорога |
| Парковка | Пустая парковка |
| Изменение двойного маршрута | Прямая дорога со стволами и дорожными знаками, которые настроены для выполнения маневра изменения двойного маршрута |
| Открытая поверхность | Плоское, черное покрытие дорожного покрытия без дорожных объектов |
| Городской блок США | Городской блок с перекрестками, барьерами и светофорами |
| Шоссе США | Шоссе с конусами, барьерами, светофорами и дорожными знаками |
| Большая парковка | Парковка с припаркованными автомобилями, конусами, бордюрами и дорожными знаками |
| Виртуальный MCITY | Окружение города, представляющая испытательные основания Мичиганского университета (см. Mcity Test Facility); включает конусы, барьеры, животное, светофоры и дорожные знаки |
Если у вас есть пакет поддержки Automated Driving Toolbox Interface для Unreal Engine 4 Projects, то можно изменить эти сцены или создать новые таковые. Для получения дополнительной информации смотрите Настроить нереальные сцены Engine для беспилотного вождения.
Чтобы определить виртуальное транспортное средство в сцене, добавьте блок Simulation 3D Vehicle with Ground Following к модели. Используя этот блок, вы можете управлять перемещением транспортного средства, задавая значения X, Y и yaw, которые определяют его положение и ориентацию на каждом временном шаге. Автоматически транспортное средство перемещается по земле.
Вы также можете задать цвет и тип транспортного средства. Тулбокс включает следующие типы транспортных средств:
Можно задать виртуальные датчики и прикрепить их в различных положениях на транспортных средствах. Тулбокс включает эти моделирование и блоки Configuration датчика.
| Блок | Описание |
|---|---|
| Simulation 3D Camera | Модель камеры с объективом. Включает параметры для размера изображения, фокусного расстояния, искажений и перекоса. |
| Simulation 3D Fisheye Camera | Fisheye-камера, которую можно описать с помощью модели камеры Scaramuzza. Включает параметры для центра искажений, размера изображения и коэффициентов отображения. |
| Simulation 3D Lidar | Сканирующая модель датчика лидара. Включает параметры для области значений обнаружения, разрешения и полей зрения. |
| Simulation 3D Probabilistic Radar | Вероятностная радиолокационная модель, которая возвращает список обнаружений. Включает параметры для радиолокационной точности, смещения радара, вероятности обнаружения и сообщения об обнаружении. Он не моделирует радар на уровне распространения электромагнитной волны. |
| Simulation 3D Probabilistic Radar Configuration | Конфигурирует радиолокационные сигнатуры для всех актёров, обнаруженных блоками Simulation 3D Probabilistic Radar в модели. |
| Simulation 3D Vision Detection Generator | Модель камеры, которая возвращает список обнаружений контуров объектов и маршрутов. Включает параметры для точности обнаружения моделирования, шума измерений и внутренней характеристики камеры. |
Для получения дополнительной информации о выборе датчика смотрите Выбор датчика для Unreal Engine Simulation.
Блоки симуляции Automated Driving Toolbox обеспечивают инструменты для проверки и визуализации планирования пути, управления автомобилем и алгоритмов восприятия.
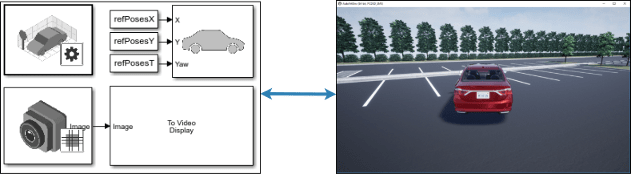
Можно использовать среду симуляции Unreal Engine, чтобы визуализировать движение транспортного средства в предварительно построенной сцене. Это окружение предоставляет вам способ анализа эффективности планирования пути и алгоритмов управления автомобиля. После разработки этих алгоритмов в Simulink, можно использовать drivingsim3d библиотека для визуализации движения транспортного средства в одной из предварительно построенных сцен.
Для примера планирования пути и визуализации алгоритма управления транспортным средством, смотрите Визуализируйте Автоматическую Парковку Valet Используя Unreal Engine Simulation.
Automated Driving Toolbox предоставляет несколько блоков для детального моделирования камеры, радара и лидара. Путем установки этих датчиков на транспортных средствах в виртуальном окружении, вы можете сгенерировать синтетические данные о датчике или обнаружения датчика, чтобы проверить эффективность ваших моделей датчика на соответствие алгоритмам восприятия. Для примера генерации радиолокационных обнаружений смотрите Simulate Vision и Radar Sensors в Unreal Engine Environment.
Можно также вывести и визуализировать достоверные данные, чтобы подтвердить алгоритмы оценки глубины и обучить семантические сети сегментации. Для получения примера смотрите Depth and Semantic Segmentation Visualization Using Unreal Engine Симуляции.
Разработка алгоритма локализации и оценка его эффективности в различных условиях является сложной задачей. Одна из самых больших проблем - получение основной истины. Хотя можно захватить основную истину с помощью дорогих, высокоточных инерционных навигационных систем (INS), виртуальная симуляция является экономически эффективной альтернативой. Использование симуляции позволяет тестировать в различных сценариях и строениях датчика. Это также обеспечивает быструю итерацию развития и обеспечивает точную основную истину. Для примера разработайте и оцените алгоритм локализации лидара, используя синтетические данные лидара из среды симуляции Unreal Engine, см. Lidar Localization with Unreal Engine Simulation.
После того, как вы проектируете и тестируете систему восприятия в среде симуляции, можно использовать эту систему для управления системой управления, которая фактически управляет транспортным средством. В этом случае, вместо того, чтобы вручную настроить траекторию, транспортное средство использует систему восприятия, чтобы управлять собой. Объединяя восприятие и управление в систему с обратной связью в 3D среде симуляции, можно разработать и протестировать более сложные алгоритмы, такие как помощь в поддержании маршрута и адаптивный круиз-контроль.
Пример системы с обратной связью в среде Unreal Engine см. в разделе Highway Lane Following.
