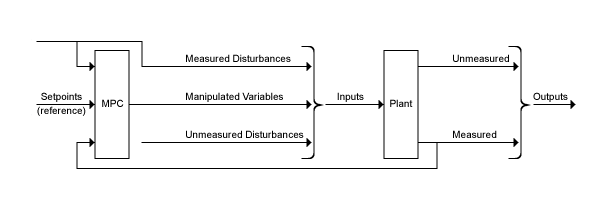
Модельный прогнозирующий контроллер использует линейные модели объекта, нарушения порядка и шума, чтобы оценить состояние контроллера и предсказать будущие выходы объекта. Используя предсказанные выходы объекта управления, контроллер решает квадратичную задачу оптимизации программирования, чтобы определить оптимальные манипулированные переменные корректировки. Для получения дополнительной информации о структуре прогнозирующих контроллеров модели, см. MPC Modeling. Используя свои модели объекта, нарушения порядка и шума, можно создать контроллер MPC с помощью приложения MPC Designer или в командной строке. Можно симулировать эффективность контроллера в командной строке или в Simulink®.