Назначьте кинематические переменные из объекта KinematicsSolver в качестве целей
addTargetVariables( присваивает в качестве целевых переменных кинематические переменные, перечисленные в ks,ids)KinematicsSolver ks объекта под именами, приведенными в ids аргумент. Те, которые действительно служат ограничениями для применения во время анализа. Их значения должны быть определены позже в порядок, чтобы запустить анализ. Решатель, при вызове, ищет решение, совместимое с целевыми переменными joint и frame.
Выходы - обновленная таблица с целевыми переменными - как новыми, так и старыми - в строках. Каждая строка задает идентификатор переменной, тип и блок путь соединения, которому она принадлежит, если переменная соединения, основа и последующая системы координат, из которых она порождает, если переменная системы координат, и модуль для ее числового значения. Переменные оцениваются в добавленном порядке.
Большинство переменных можно присвоить по отдельности. Несколько должно быть назначено группами - компонентами оси вместе с углом поворота в сферических примитивах; угол поворота вместе с азимутальным углом в примитивах постоянной скорости. (Угол поворота может быть назначен индивидуально, но угол азимута не может.)
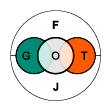
Рисунок показывает переменные общего KinematicsSolver объект. Целевые (T), начальные (G) и выходные (O) переменные могут быть переменными соединений (J) или кадровыми переменными (F). Та же переменная может служить в качестве цели и вывода, но если она служит в качестве цели, то она не может удвоиться как предположение. Назначение переменной предположения в качестве цели очищает ее как предположение.
Как и в случае с позиционными целями в блоках соединений в регулярных моделях Simulink, целевые переменные не должны чрезмерно напряжать описанную ими систему. Сборка переопределяется, если кинематическая замкнутая цепь в ней имеет цель для каждого соединения. Кинематические замкнутые цепи, такие как четырехзвенники и кривошипные ползунки, очевидны из модели. Другие возникают при формулировании кинематической задачи, которую нужно решить.
Кинематические цепи, такие как роботизированные руки и другие последовательные манипуляторы, становятся кинематическими замкнутыми цепями, когда они подвержены ограничениям на закрытие. Цель для переменной кадра между основой и конечными системами координат добавляет эквивалент такого ограничения. Если замкнутая цепь должна быть недостаточно напряжена, по крайней мере, одно из ее соединений должно оставаться свободным от целевых переменных.
Добавление целевой переменной, которая переопределяет причины сборки addTargetVariables для сбоя с ошибкой. Рассмотрите начальные переменные предположения для последнего соединения кинематической замкнутой цепи, при необходимости, чтобы направить соединение на место, не чрезмерно напряжая узел. Используйте addInitialGuessVariables функция объекта, чтобы назначить кинематическую переменную в качестве начального предположения.
clearTargetVariables | KinematicsSolver | removeTargetVariables | targetVariables
