Асинхронная машина с фазным ротором с параметризацией в единицах СИ или относительных
Simscape/Электрический/Электромеханический/Асинхронный
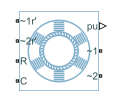
Блок Induction Machine Wound Rotor моделирует асинхронную машину с фазным ротором с фундаментальными параметрами, выраженными в относительных единицах или в Международной системе единиц (СИ). Асинхронная машина с фазным ротором является типом асинхронной машины. Все соединения статора и ротора доступны на блоке. Поэтому можно смоделировать режимы мягкого запуска с помощью переключателя между строениями wye и delta или путем увеличения сопротивления ротора. Если вам не нужен доступ к обмоткам ротора, используйте вместо этого Induction Machine Squirrel Cage блок.
Соедините порт ~1 с трехфазной схемой. Чтобы соединить статор в дельта- строение, соедините Phase Permute блок между портами ~1 и ~2. Чтобы подключить статор в строении wye, соедините порт ~2 с блоком Grounded Neutral или Floating Neutral. Если вам не нужно изменять сопротивление ротора, соедините порт ~1r' ротора с блоком Floating Neutral и порт ротора ~2r' с блоком Grounded Neutral.
Схема ротора относится к статору. Поэтому, когда вы используете блок в схеме, относите любые дополнительные параметры схемы к статору.
Если блок находится в сети, которая совместима с частотно-временным режимом симуляции, можно выполнить анализ потока нагрузки в сети. Анализ скорость-нагрузки обеспечивает установившиеся значения, которые можно использовать для инициализации машины.
Для получения дополнительной информации смотрите Выполните анализ потока нагрузки с помощью Simscape Electrical и Frequency and Time Simulation Mode. Для примера, который показывает, как инициализировать асинхронную машину с помощью данных анализа потока нагрузки, см. Инициализацию индукционного двигателя с потоком нагрузки.
Для реализации СИ блок преобразует значения СИ, которые вы вводите, в значения в относительных единицах для симуляции. Преобразованные значения основаны на машине, соединяемой в строении обмотки дельта.
Для реализации в относительных единицах необходимо задать сопротивления и индуктивности в вкладке импедансов на основе машины, соединяемой в строении дельта-обмотки.
Для получения информации о связи между параметрами машины в единицах СИ и относительных, смотрите Преобразование в единицах для параметров машины. Для получения информации о параметризации в относительных единицах смотрите Система модулей в относительных единицах.
Асинхронные уравнения машины выражены относительно синхронной системе координат, заданной как
где frated - значение параметра Rated electrical frequency.
Преобразование Park преобразует уравнения статора в опорную систему координат, которая является стационарной относительно номинальной электрической частоты. Преобразование Парка определяется
где θe - электрический угол.
Уравнения ротора преобразуются в другую систему координат, заданное различием между электрическим углом и продуктом угла, и количеством пар полюсов N:
Преобразование Park используется, чтобы задать асинхронные уравнения машины в относительных единицах. Уравнения напряжения статора заданы как
и
где:
vds, vqs и v0s являются d -осью, q -осью и напряжениями статора с нулевой последовательностью, заданными как
va, vb и vc являются напряжениями статора через порты ~1 и ~2.
ωbase - базовая электрическая скорость в относительных единицах.
ψds, ψqs и ψ0s являются d -осью, q -осью и потоками статора с нулевой последовательностью.
Rs - сопротивление статора.
ids, iqs и i0s являются d -осью, q -осью и токами статора с нулевой последовательностью, заданными как
ia, ib и ic являются токами статора, протекающими от порта ~1 к порту ~2.
Уравнения напряжения ротора заданы как
и
где:
vdr, vqr и v0r являются d осью, q осью и напряжениями ротора нулевой последовательности, заданными как
var, vbr и vcr являются напряжениями ротора через порты ~1r' и ~2r'.
ψdr, ψqr и ψ0r являются d -осью, q -осью и потоками ротора с нулевой последовательностью.
ω - синхронная скорость в относительных единицах. Для синхронной системы координат значение равно 1.
ωr - механическая скорость вращения в относительных единицах.
Rrd - сопротивление ротора, относящееся к статору.
idr, iqr и i0r являются d -осью, q -осью и токами ротора с нулевой последовательностью, заданными как
iar, ibr и icr являются токами ротора, протекающими от порта ~1r' к порту ~2r'.
Уравнения редактирования потока статора заданы
и
где Lss - самоиндуктивность статора, а Lm - индуктивность намагничивания.
Уравнения редактирования потока ротора заданы как
и
где Lrrd - самоиндуктивность ротора, относящаяся к статору.
Крутящий момент ротора задан как
Lss самоиндуктивности статора, Lls индуктивности утечек статора и намагничивание Lm индуктивности связаны
Самоиндуктивность Lrrd ротора, Llrd индуктивности утечек ротора и намагничивание Lm индуктивности связаны
Когда предусмотрена кривая насыщения, уравнения для определения насыщенной индуктивности намагничивания как функции намагниченного потока:
При отсутствии насыщения уравнение уменьшается до
Можно выполнить графическое изображение и отображение действий с помощью меню Electrical в контекстном меню блока.
Щелкните правой кнопкой мыши блок и в Electrical меню выберите опцию:
Display Base Values - Отображает основные значения машины в относительных единицах в MATLAB® Командное окно.
Plot Torque Speed (SI) - строит графики зависимости момента от скорости, измеренные в модулях СИ, в графическом окне MATLAB с использованием текущих параметров машины.
Plot Torque Speed (pu) - строит графики зависимости момента от скорости, обе измеренные в относительных единицах, в графическом окне MATLAB с использованием текущих параметров машины.
Plot Open-Circuit Saturation - строит графики напряжения разъема от тока без линии нагрузки, оба в относительных единицах, в графическое окно MATLAB. График содержит три следа:
Ненасыщенный - индуктивность намагничивания статора (ненасыщенная).
Насыщенный - Интерполяционная таблица разомкнутой цепи (v от i), которую вы задаете.
Выведено - Интерполяционная таблица разомкнутой цепи, полученная из указанной вами интерполяционной таблицы разомкнутой цепи в относительных единицах (v от i). Эти данные используются для вычисления насыщенной индуктивности намагничивания, Lm_sat и коэффициента насыщения, Ks, от магнитного потокосцепления, ψm, характеристик.
Plot Saturation Factor - строит графики коэффициента насыщения, Ks, от магнитного потокосцепления, ψm, в графическом окне MATLAB с использованием параметров машины. Этот параметр получают из других параметров, которые вы задаете:
Отсутствие нагрузки линии данные насыщения тока, i
Данные о насыщении напряжения на клемме, v
Индуктивность утечек, Lls
Plot Saturated Inductance - графики намагничивания индуктивности, Lm_sat, от магнитного потокосцепления, ψm, в графическом окне MATLAB с использованием параметров машины. Этот параметр получают из других параметров, которые вы задаете:
Отсутствие нагрузки линии данные насыщения тока, i
Данные о насыщении напряжения на клемме, v
Индуктивность утечек, Lls
Для реализации СИ v находится в V (фазовая RMS) и i находится в A (rms).
Используйте настройки Variables, чтобы задать приоритет и начальные целевые значения для основных переменных перед симуляцией. Для получения дополнительной информации смотрите Задать приоритет и Начальный целевой объект для основных переменных.
Тип переменных, которые видны в настройках Variables, зависит от метода инициализации, который вы выбираете, в настройках Main для параметра Initialization option. Чтобы задать целевые значения с помощью:
Переменные Flux - Установите параметр Initialization option равным Set targets for flux variables.
Данные из анализа загрузка-поток - Установите параметр Initialization option равным Set targets for load flow variables.
Если вы выбираете Set targets for load flow variablesЧтобы полностью задать начальное условие, необходимо включить ограничение инициализации в виде высокоприоритетного целевого значения. Например, если Ваша асинхронная машина связана с Inertia блок, начальное условие для асинхронной машины полностью определено, если, в Variables параметрах настройки Inertia блок, Priority для Rotational velocity установлен в High. Кроме того, можно задать Priority на None для Inertia блоков Rotational velocity и вместо этого установите Priority для блоков Slip, Real power generated или Mechanical power consumed асинхронных машин High.
[1] Кундур, П. Устойчивость системы Степени и Управление. Нью-Йорк, Нью-Йорк: McGraw Hill, 1993.
[2] Лышевский, С. Е. Электромеханические системы, электрические машины и прикладная мехатроника. Бока Ратон, FL: CRC Press, 1999.
[3] Ojo, J. O., Consoli, A., and Lipo, T. A., «Улучшенная модель насыщенных асинхронных машин», Транзакции IEEE на отраслевых приложениях. Том 26, № 2, стр. 212-221, 1990.

