Оцените 2-D геометрическое преобразование из совпадающих пар точек
tform = estimateGeometricTransform2D(matchedPoints1,matchedPoints2,transformType)matchedPoints1 к inliers в совпадающих точках от другого изображения matchedPoints2.
[ дополнительно возвращает вектор, задающий каждую совпадающую пару точек как inlier или выбросы, используя входные параметры из предыдущего синтаксиса.tform,inlierIndex]
= estimateGeometricTransform2D(___)
[ дополнительно возвращает код состояния, указывающий, могла ли функция оценить преобразование, и, если нет, почему это не удалось. Если вы не задаете tform,inlierIndex,status] = estimateGeometricTransform2D(___)status Выходу функция вместо этого возвращает ошибку для условий, которые не могут привести к результатам.
[___] = estimateGeometricTransform2D(___, задает дополнительные опции, используя один или несколько аргументы пары "имя-значение" в дополнение к любой комбинации аргументов из предыдущих синтаксисов. Для примера, Name,Value)'Confidence',99 устанавливает значение доверия для нахождения максимального количества инлиеров равным 99.
Прочитайте изображение и отобразите его.
original = imread('cameraman.tif'); imshow(original) title('Base Image')
![]()
Искажает и отображает преобразованное изображение.
distorted = imresize(original,0.7);
distorted = imrotate(distorted,31);
figure
imshow(distorted)
title('Transformed Image')![]()
Обнаружение и извлечение функций из оригинала и преобразованных изображений.
ptsOriginal = detectSURFFeatures(original); ptsDistorted = detectSURFFeatures(distorted); [featuresOriginal,validPtsOriginal] = extractFeatures(original,ptsOriginal); [featuresDistorted,validPtsDistorted] = extractFeatures(distorted,ptsDistorted);
Соответствие и отображение функций между изображениями.
index_pairs = matchFeatures(featuresOriginal,featuresDistorted);
matchedPtsOriginal = validPtsOriginal(index_pairs(:,1));
matchedPtsDistorted = validPtsDistorted(index_pairs(:,2));
figure
showMatchedFeatures(original,distorted,matchedPtsOriginal,matchedPtsDistorted)
title('Matched SURF Points With Outliers');![]()
Исключить выбросы, оценить матрицу преобразования и отобразить результаты.
[tform,inlierIdx] = estimateGeometricTransform2D(matchedPtsDistorted,matchedPtsOriginal,'similarity'); inlierPtsDistorted = matchedPtsDistorted(inlierIdx,:); inlierPtsOriginal = matchedPtsOriginal(inlierIdx,:); figure showMatchedFeatures(original,distorted,inlierPtsOriginal,inlierPtsDistorted) title('Matched Inlier Points')
![]()
Используйте предполагаемое преобразование, чтобы восстановить и отобразить оригинальное изображение из искаженного изображения.
outputView = imref2d(size(original)); Ir = imwarp(distorted,tform,'OutputView',outputView); figure imshow(Ir); title('Recovered Image');
![]()
matchedPoints1 - Совпадающие точки из первого изображенияcornerPoints | объекта SURFPoints | объекта MSERRegions | объекта ORBPoints | объекта BRISKPoints | объекта KAZEPoints | объекта M -by-2 матрица координат [x, y]Совпадающие точки из первого изображения, заданные как KAZEPoints объект, cornerPoints объект, SURFPoints объект, MSERRegions объект, ORBPoints объект, BRISKPoints объект или матрица M -by-2, в которой каждая строка является парой координат [x, y], а M является количеством совпадающих точек.
matchedPoints2 - Совпадающие точки из второго изображения cornerPoints | объекта SURFPoints | объекта MSERRegions | объекта ORBPoints | объекта BRISKPoints | объекта KAZEPoints | объекта M -by-2 матрица координат [x, y]Совпадающие точки из второго изображения, заданные как KAZEPoints объект, cornerPoints объект, SURFPoints объект, MSERRegions объект, ORBPoints объект, BRISKPoints объект или матрица M -by-2, в которой каждая строка является парой координат [x, y], а M является количеством совпадающих точек.
transformType - Тип преобразования'rigid' | 'similarity' | 'affine' | 'projective'Тип преобразования, заданный как символьная строка. Можно задать тип преобразования 'rigid', 'similarity', 'affine', или 'projective'. Каждый тип преобразования требует минимального количества совпадающих пар точек, чтобы оценить преобразование. Обычно можно улучшить точность преобразования, используя большее количество совпадающих пар точек. В этой таблице показан тип объекта, связанный с каждым типом преобразования, и минимальное количество совпадающих пар точек, которое требуется преобразованию.
| Тип преобразования | tform Объект | Минимальное количество совпадающих пар точек |
|---|---|---|
'rigid' | rigid2d | 2 |
'similarity' | affine2d | 2 |
'affine' | affine2d | 3 |
'projective' | projective2d | 4 |
Типы данных: string
Задайте необязательные разделенные разделенными запятой парами Name,Value аргументы. Name - имя аргумента и Value - соответствующее значение. Name должны находиться внутри кавычек. Можно задать несколько аргументов в виде пар имен и значений в любом порядке Name1,Value1,...,NameN,ValueN.
'Confidence', 99 устанавливает значение доверия для нахождения максимального количества инлиеров равным 99.'MaxNumTrials' - Максимальное количество случайных испытаний1000 (по умолчанию) | положительное целое числоМаксимальное количество случайных испытаний, заданное как разделенная разделенными запятой парами, состоящая из 'MaxNumTrials' и положительное целое число. Это значение задает количество рандомизированных попыток, которые функция предпринимает, чтобы найти совпадающие пары точек. Установка более высокого значения заставляет функцию выполнять дополнительные расчеты, что увеличивает вероятность нахождения инлиеров.
Типы данных: single | double | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64
'Confidence' - Доверие в нахождении максимального количества инлиеров99 (по умолчанию) | положительный числовой скалярДоверие в нахождении максимального количества инкрустаторов, заданная как разделенная разделенными запятой парами, состоящая из 'Confidence' и положительный числовой скаляр в области значений (0, 100). Увеличение этого значения заставляет функцию выполнять дополнительные расчеты, что увеличивает вероятность нахождения большего количества инлиеров.
Типы данных: single | double | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64
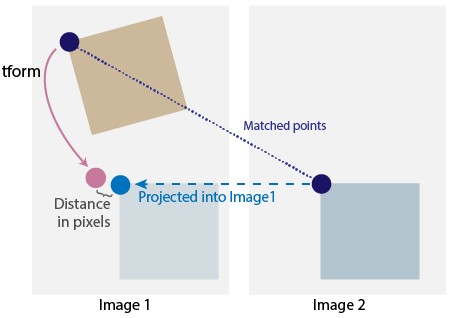
'MaxDistance' - Максимальное расстояние от точки до проекции1.5 (по умолчанию) | положительный числовой скалярМаксимальное расстояние от точки до проекции соответствующей точки, заданное как разделенная разделенными запятой парами, состоящая из 'MaxDistance' и положительный числовой скаляр. 'MaxDistance' задает максимальное расстояние в пикселях, которое точка может отличаться от проективного местоположения соответствующей точки, которая должна считаться inlier. Соответствующая проекция основана на оцененном преобразовании.
Функция проверяет преобразование из matchedPoints1 на matchedPoints2, а затем вычисляет расстояние между совпадающими точками в каждой паре после применения преобразования. Если расстояние между совпадающими точками в паре больше, чем 'MaxDistance' значение, затем пара рассматривается как выбросы для этого преобразования. Если расстояние меньше 'MaxDistance', тогда пара рассматривается как inlier.
Типы данных: single | double | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64
Функция исключает выбросы, используя алгоритм консенсуса выборки M-estimator (MSAC). Алгоритм MSAC является вариантом алгоритма консенсуса случайной выборки (RANSAC). Результаты могут не быть идентичными между запусками из-за рандомизированного характера алгоритма MSAC.
[1] Хартли, Ричард и Эндрю Зиссерман. Несколько видов геометрии в Компьютерное Зрение. 2-й эд. Кембридж, Великобритания; Нью-Йорк: Cambridge University Press, 2003.
[2] Торр, P.H.S., и А. Циссерман. MLESAC: новый робастный оценщик с приложением для оценки геометрии изображения. Компьютерное зрение и понимание изображений 78, № 1 (апрель 2000): 138-56. https://doi.org/10.1006/cviu.1999.0832.
detectFASTFeatures | detectMinEigenFeatures | detectMSERFeatures | detectORBFeatures | detectSURFFeatures | estimateFundamentalMatrix | estimateGeometricTransform3D | extractFeatures | fitgeotrans | matchFeatures | rgb2gray