Двойное изменение маршрута 3D среда
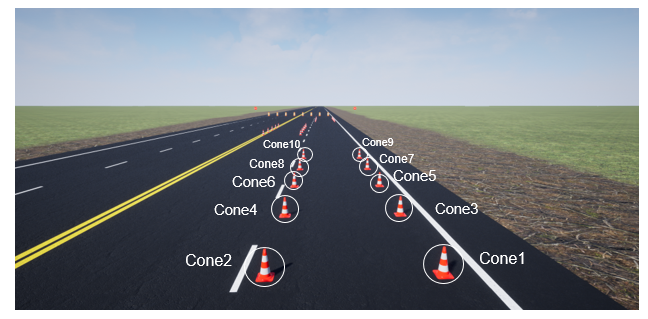
Сцена содержит прямую дорогу, камеру, два автомобиля, конусы, баррели и дорожные знаки.

Чтобы моделировать ведущий маневр в двойном маршруте изменяют 3D среду, в окне Simulink®, открывают блок Simulation 3D Config. Используйте любую из этих настроек установки параметра.
Установите Scene description на Double lane change.
Установите Scene description на Custom и Project name к VehicleSimulation.exe /Game/Maps/DblLnChng.
Сцена использует систему мировой координаты, чтобы определить местоположение объектов.
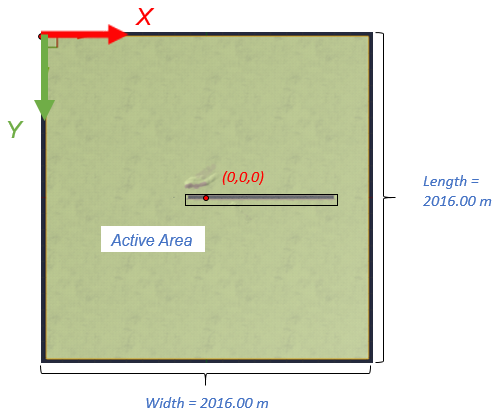
Активная область сцены содержит дорогу.
Эта таблица обеспечивает угловые местоположения области сцены в системе мировой координаты. Размерности находятся в m.
Местоположения | X | Y | Z |
|---|---|---|---|
Сцена — Левый верхний | -1008 | -1008 | 0 |
Сцена — Правый нижний | 1008 | 1008 | 0 |
Активная область — Левая нижняя часть | -122.19 | 6.99 | 0 |
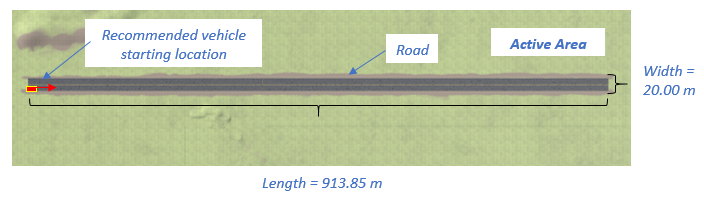
Эта таблица обеспечивает имена и рекомендовала стартовые местоположения в системе мировой координаты. Размерности находятся в m.
Имя тега | Нереальный Engine® Editor Name | Рекомендуемое стартовое местоположение | |||||
|---|---|---|---|---|---|---|---|
X | Y | Z | Список | Подача | Отклонение от курса | ||
|
| 0 | 3.125 | 0 | 0 | 0 | 0 |
|
| 0 | 3.125 | 0 | 0 | 0 | 0 |
Эта таблица предоставляет имени камеры получения сцены и Нереальному редактору Engine родительский элемент. Родительский элемент является объектом, к которому присоединяется камера.
Имя тега | Нереальный редактор Engine имя | Нереальный редактор Engine родительский элемент |
|---|---|---|
|
| Мир (корень) |

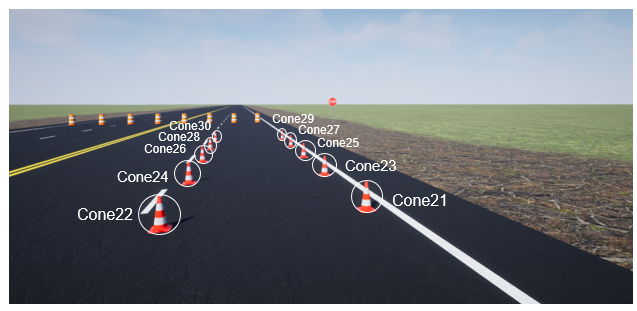
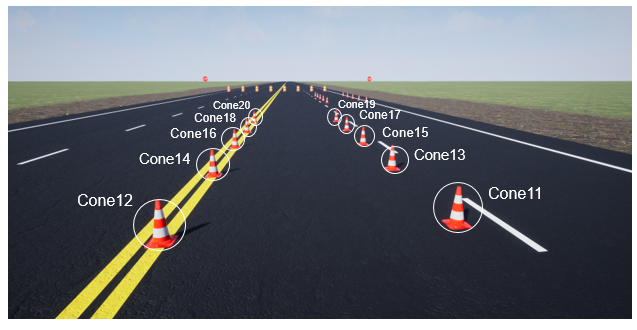
Эта таблица обеспечивает имена объектов и местоположения в системе мировой координаты. Размерности находятся в m.
Объект | Нереальный редактор Engine имя | Местоположение | |||||
|---|---|---|---|---|---|---|---|
X | Y | Z | Список | Подача | Отклонение от курса | ||
| Конус |
| 175.90 | 4.73 | .009 | 0 | 0 | 0 |
| 175.90 | 1.70 | .009 | ||||
| 178.90 | 4.73 | .009 | ||||
| 178.90 | 1.70 | .009 | ||||
| 181.90 | 4.73 | .009 | ||||
| 181.90 | 1.70 | .009 | ||||
| 184.90 | 4.73 | .009 | ||||
| 184.90 | 1.70 | .009 | ||||
| 187.90 | 4.73 | .009 | ||||
| 187.90 | 1.70 | .009 | ||||
| 201.40 | 0.69 | .009 | ||||
| 201.40 | -2.86 | .009 | ||||
| 204.15 | 0.69 | .009 | ||||
| 204.15 | -2.86 | .009 | ||||
| 206.90 | 0.69 | .009 | ||||
| 206.90 | -2.86 | .009 | ||||
| 209.65 | 0.69 | .009 | ||||
| 209.65 | -2.86 | .009 | ||||
| 212.40 | 0.69 | .009 | ||||
| 212.40 | -2.86 | .009 | ||||
| 224.90 | 4.95 | .009 | ||||
| 224.90 | 1.70 | .009 | ||||
| 227.90 | 4.95 | .009 | ||||
| 227.90 | 1.70 | .009 | ||||
| 230.90 | 4.95 | .009 | ||||
| 230.90 | 1.70 | .009 | ||||
| 233.90 | 4.95 | .009 | ||||
| 236.90 | 1.70 | .009 | ||||
| 236.90 | 4.95 | .009 | ||||
| 236.90 | 1.70 | .009 | ||||

Эта таблица обеспечивает местоположения имен объектов в системе мировой координаты. Размерности находятся в m.
Объект | Нереальный редактор Engine имя | Местоположение | |||||
|---|---|---|---|---|---|---|---|
X | Y | Z | Список | Подача | Отклонение от курса | ||
Дорожный знак |
| 248.80 | -13.10 | 0 | 0 | 0 | 0 |
| 248.80 | 10.90 | 0 | ||||

Эта таблица обеспечивает имена объектов и местоположения в системе мировой координаты. Размерности находятся в m.
Объект | Нереальный редактор Engine имя | Местоположение | |||||
|---|---|---|---|---|---|---|---|
X | Y | Z | Список | Подача | Отклонение от курса | ||
Баррели |
| 252.70 | 4.50 | 0 | 0 | 0 | 180.00° |
| 252.70 | 2.35 | 0 | 0 | 0 | 0 | |
| 252.70 | .20 | 0 | 0 | 0 | 0 | |
| 252.70 | -1.95 | 0 | 0 | 0 | 0 | |
| 252.70 | -4.10 | 0 | 0 | 0 | 0 | |
| 252.70 | -6.25 | 0 | 0 | 0 | 0 | |
| 252.70 | -8.40 | 0 | 0 | 0 | 0 | |
| 252.70 | -10.55 | 0 | 0 | 0 | 0 | |
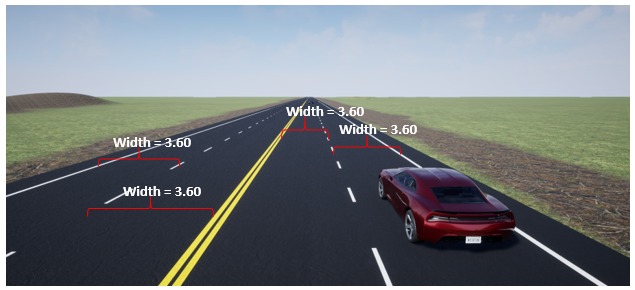
Эти данные показывают размерности маршрута в m.
3D среда визуализации использует систему мировой координаты с осями, которые фиксируются в инерционном ссылочном кадре.
![]()
| Ось | Описание |
|---|---|
| X | Передайте направление автомобиля Список — вращение, Выполненное правой рукой, вокруг Оси X |
| Y | Расширяет справа от автомобиля, параллельного наземной плоскости Подача — вращение, Выполненное правой рукой, вокруг Оси Y |
| Z | Расширяет вверх Отклонение от курса — вращение, Выполненное левой рукой, вокруг оси Z |
Кервед-Роуд | Большая парковка | Открытая поверхность | Парковка | Симуляция 3D Config | Стрэайт-Роуд | Городской квартал США | Магистраль США | Виртуальный Макити
