Обнаружение объектов является методом компьютерного зрения для определения местоположения экземпляров объектов в изображениях или видео. Алгоритмы обнаружения объектов обычно усиливают машинное обучение или глубокое обучение, чтобы привести к значимым результатам. При рассмотрении изображений или видео, люди могут распознать и определить местоположение предметов интереса в течение моментов. Цель обнаружения объектов состоит в том, чтобы реплицировать этот интеллект с помощью компьютера. Лучший подход для обнаружения объектов зависит от вашего приложения и задачи, которую вы пытаетесь решить.
Методы глубокого обучения требуют большого количества помеченных учебных изображений, таким образом, использованию графического процессора рекомендуют уменьшиться, время должно было обучить модель. Основанные на глубоком обучении подходы к обнаружению объектов используют сверточные нейронные сети (CNNs или ConvNets), такие как R-CNN и YOLO v2 или однократное обнаружение (SSD) использования. Можно обучить детектор пользовательского объекта или использовать предварительно обученный детектор объектов путем усиления передачи обучения, подход, который позволяет вам запуститься с предварительно обученной сети и затем подстроить ее для своего приложения. Сверточные нейронные сети требуют Deep Learning Toolbox™. Обучение и предсказание поддерживаются на графическом процессоре CUDA®-capable. Использование графического процессора рекомендуется и требует Parallel Computing Toolbox™. Для получения дополнительной информации смотрите Настройки Computer Vision Toolbox и Поддержку Параллельных вычислений в Продуктах Mathworks (Parallel Computing Toolbox).
Методы машинного обучения для обнаружения объектов включают совокупные функции канала (ACF), классификация машин опорных векторов (SVM) с помощью гистограмм ориентированного градиента (ПОЖИРАТЕЛЬ РЕСУРСОВ) функции и алгоритм Виолы - Джонса для человеческой поверхности или обнаружения верхней части тела. Можно принять решение запуститься с предварительно обученного детектора объектов или создать детектор пользовательского объекта, чтобы удовлетворить приложению.
| Image Labeler | Пометьте изображения для приложений компьютерного зрения |
| Video Labeler | Пометьте видео для приложений компьютерного зрения |
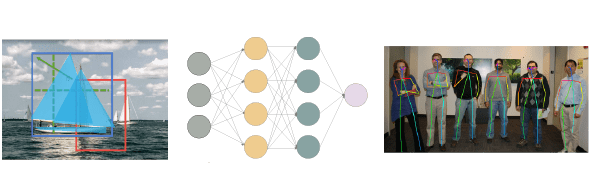
Начало работы с обнаружением объектов Используя глубокое обучение
Обнаружение объектов с помощью глубоких нейронных сетей.
Выберите функции, которые возвращают и принимают объекты точек для нескольких типов функций
Укажите индексы пикселей, пространственные координаты и трехмерные системы координат
Обнаружение локального признака и экстракция
Узнайте о преимуществах и приложениях локального обнаружения и извлечения объектов
Отобразите классификацию с мешком визуальных слов
Используйте функции Computer Vision Toolbox™ для классификации категорий изображений путем создания мешка визуальных слов.
Начало работы с каскадным детектором объектов
Обучите пользовательский классификатор
Выберите Function to Visualize Detected Objects
Сравните функции визуализации.
Интерактивно помечайте прямоугольные ROI для обнаружения объектов, пиксели для семантической сегментации, многоугольники, например, сегментация и сцены для классификации изображений.
Интерактивно помечайте прямоугольные ROI для обнаружения объектов, пиксели для семантической сегментации, многоугольники, например, сегментация и сцены для классификации изображений в видео или последовательности изображений.
Хранилища данных для глубокого обучения (Deep Learning Toolbox)
Узнать, как использовать хранилища данных в применении глубокого обучения.
Начало работы с маской R-CNN, например, сегментация
Выполните сегментацию мультиэкземпляра класса с помощью Маски R-CNN и глубокое обучение.
Обучающие данные для обнаружения объектов и Семантической Сегментации
Создайте обучающие данные для обнаружения объектов или семантической сегментации с помощью Image Labeler или Video Labeler.
Deep Network Designer (Deep Learning Toolbox)
Список слоев глубокого обучения (Deep Learning Toolbox)
Узнайте все слои глубокого обучения в MATLAB®.
Глубокое обучение в MATLAB (Deep Learning Toolbox)
Узнайте возможности глубокого обучения в сверточных нейронных сетях использования MATLAB для классификации и регрессии, включая предварительно обученные сети и передачу обучения и обучение на графических процессорах, центральных процессорах, кластерах и облаках.
Предварительно обученные глубокие нейронные сети (Deep Learning Toolbox)
Узнать, как загружать и использовать предварительно обученные сверточные нейронные сети для классификации, передачи обучения и извлечения признаков.












