Bird 's-Eye Scope визуализирует сигналы от модели Simulink ®, которые представляют аспекты сценария вождения. С помощью области можно анализировать:
Сенсорные покрытия датчиков зрения, радара и лидара
Сенсорные обнаружения действующих лиц и границ полос движения
Следы движущихся объектов в сценарии
В этом примере показано, как отображать эти сигналы в области и анализировать сигналы во время моделирования.
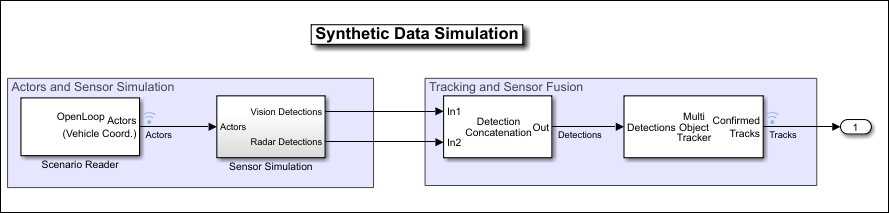
Откройте модель, содержащую сигналы для обнаружения датчиков и дорожек. Эта модель используется в синтезе датчиков с использованием синтетических данных радара и зрения в примере Simulink. Также добавьте папку файла модели в путь поиска MATLAB ®.
addpath(genpath(fullfile(matlabroot,'examples','driving'))) open_system('SyntheticDataSimulinkExample')
Откройте область из панели инструментов Simulink. В разделе Результаты проверки (Review Results) щелкните Область обзора птичьего глаза (Bird 's-Eye
При первом открытии области «Птичий глаз» холст области пуст и не отображает никаких сигналов. Чтобы найти сигналы из открытой модели, которые могут отображаться в области, на панели инструментов области щелкните Найти сигналы (Find Signals). Область обновляет блок-схему и автоматически находит сигналы в модели.
На левой панели перечислены все сигналы, найденные областью. Эти сигналы группируются на основе их источников в модели.
| Группа сигналов | Описание | Источники сигналов |
|---|---|---|
| Истина на земле | Границы дорог, разметка полос движения и барьеры в сценарии Невозможно изменить эту группу или любой из ее сигналов. Для проверки крупных дорожных сетей используйте окно «Просмотр координат мира». См. Виды координат транспортного средства и мира. |
|
| Актеры | Участники сценария, включая эго-автомобиль Невозможно изменить эту группу или любой из ее сигналов или подгрупп. Для просмотра актеров, расположенных вдали от эго-транспортного средства, используйте окно Просмотр координат мира (World Coordinates View). См. Виды координат транспортного средства и мира. |
|
| Покрытие датчика | Зоны охвата датчиков зрения, радаров и лидаров, разбитые на подгруппы Vision, Radar и Lidar В этой группе можно изменять сигналы. Можно переименовать или удалить подгруппы, но не группу верхнего уровня Sensor Coverage. Можно также добавлять подгруппы и перемещать сигналы между подгруппами. При удалении подгруппы ее сигналы перемещаются в группу Sensor Coverage верхнего уровня. | |
| Обнаружения | Обнаружения, полученные от датчиков зрения, радаров и лидаров, разбиты на подгруппы Vision, Radar и Lidar В этой группе можно изменять сигналы. Можно переименовать или удалить подгруппы, но не группу обнаружений верхнего уровня. Можно также добавлять подгруппы и перемещать сигналы между подгруппами. При удалении подгруппы ее сигналы перемещаются в группу обнаружений верхнего уровня. | |
| Следы | Дорожки объектов в сценарии В этой группе можно изменять сигналы. Можно переименовать или удалить подгруппы, но не группу «Дорожки» верхнего уровня. В эту группу также можно добавлять подгруппы и перемещать в них сигналы. При удалении подгруппы ее сигналы перемещаются в группу дорожек верхнего уровня. |
Bird 's-Eye Scope отображает дорожки в координатах эго-транспортного средства. Дорожки в любой другой системе координат будут отображаться как смещение в области видимости. |
| Другие применимые сигналы | Сигналы о том, что область не может быть автоматически сгруппирована, например, сигналы, объединяющие информацию от нескольких датчиков Можно изменять сигналы в этой группе, но нельзя добавлять подгруппы. Сигналы в этой группе не отображаются во время моделирования. |
|
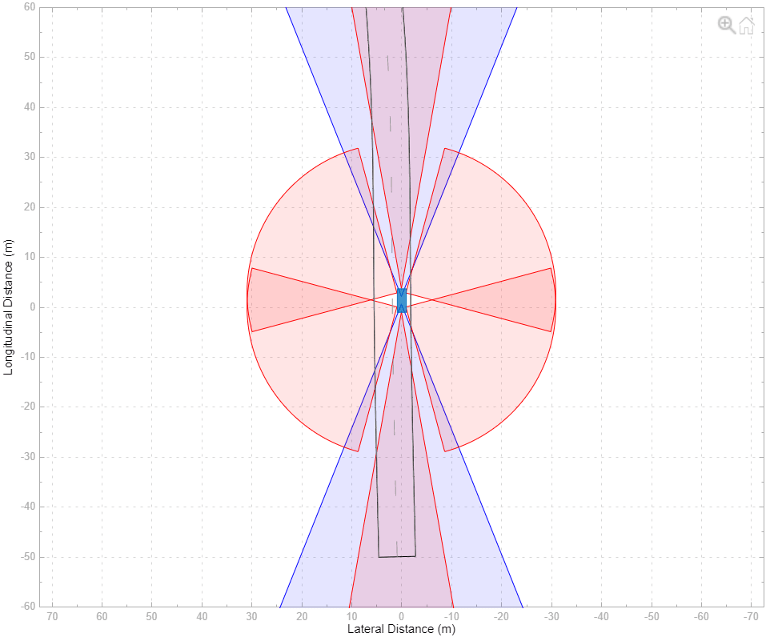
Перед моделированием, но после нажатия кнопки Find Signals (Поиск сигналов), на холсте области отображаются все сигналы Ground Truth, за исключением не-ego-акторов и всех сигналов Sensor Coverage. Объекты, не являющиеся эго, и сигналы в разделе Обнаружения (Detections) и Дорожки (Tracks) не отображаются, пока модель не будет смоделирована. Сигналы в разделе «Другие применимые сигналы» не отображаются во время моделирования. Если требуется, чтобы область отображала определенные сигналы, переместите их в соответствующую группу перед моделированием. Если соответствующая группа не существует, создайте ее.
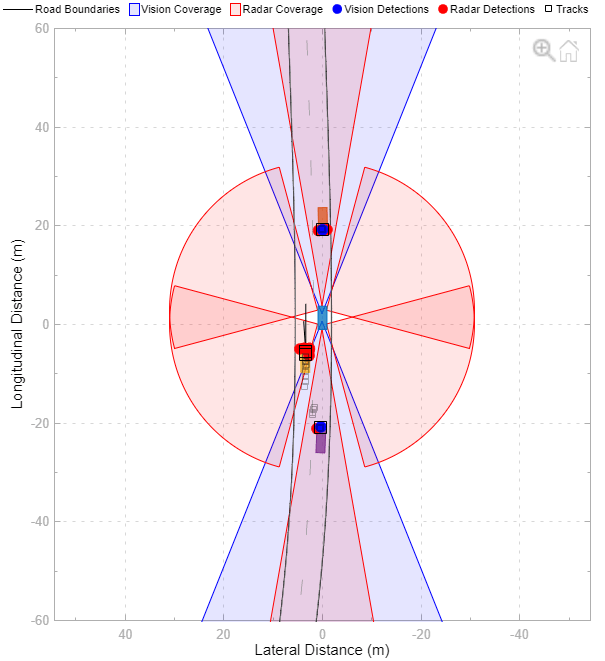
Смоделировать модель из области «Птичий глаз» (Bird 's-Eye Scope), щелкнув Выполнить (Run). На холсте области отображаются обнаруженные объекты и дорожки. Для отображения легенды на панели инструментов области выберите «Легенда».
Во время моделирования можно выполнить следующие действия:
Проверка обнаружений, дорожек, зон действия датчиков и поведения эго-транспортных средств. Вид по умолчанию отображает моделирование в координатах транспортного средства и центрируется на эго-транспортном средстве. Чтобы просмотреть более широкую область вокруг эго-транспортного средства или другие части сценария, на панели инструментов области действия щелкните «Мировые координаты». В окне «World Coordinates View» отображается весь сценарий, при этом эго-транспортное средство обведено кружком. Этот круг не является зоной действия датчика. Чтобы вернуться к отображению любого окна по умолчанию, наведите курсор на окно и в правом верхнем углу нажмите![]() кнопку «Домой». Дополнительные сведения об этих представлениях см. в разделе Представления координат транспортного средства и мира.
кнопку «Домой». Дополнительные сведения об этих представлениях см. в разделе Представления координат транспортного средства и мира.
Обновить свойства сигнала. Чтобы получить доступ к свойствам сигнала, сначала выберите сигнал на левой панели. Затем на панели инструментов области выберите «Свойства». С помощью этих свойств можно, например, показывать или скрывать зоны покрытия сенсора или обнаружения. Кроме того, чтобы выделить определенные зоны покрытия датчиков, можно изменить их цвет или прозрачность.
Обновите настройки области «Птичий глаз», например, измените границы осей окна «Vehicle Coordinates View» или измените отображение имен сигналов. На панели инструментов области выберите «Параметры». Во время моделирования нельзя изменить параметры селектора положения дорожки и селектора скорости дорожки. Дополнительные сведения см. в разделе Настройки > Представление координат транспортного средства справочной страницы «Область действия птичьего глаза».
После моделирования можно скрыть определенные обнаружения или дорожки для следующего моделирования. На левой панели в разделе Обнаружения или Дорожки щелкните правой кнопкой мыши сигнал, который требуется скрыть. Затем выберите Переместить в другое применимое (Move to Other Applicable), чтобы переместить этот сигнал в группу Другие применимые сигналы (Other Appliable Signals). Чтобы скрыть зоны покрытия датчика, выберите соответствующий сигнал на левой панели и на вкладке «Свойства» снимите флажок «Показать покрытие датчика». При моделировании нельзя скрыть сигналы «Истинность земли».
Для дальнейшей организации сигналов можно переименовать группы сигналов или переместить сигналы в новые группы. Например, подгруппы «Зрение» и «Радар» можно переименовать в «Спереди автомобиля» и «Сзади автомобиля». Затем можно перетащить сигналы по мере необходимости, чтобы переместить их в соответствующие группы на основе новых имен групп. При перетаскивании сигнала в новую группу цвет сигнала изменяется в соответствии с цветом, назначенным его группе.
Группы верхнего уровня нельзя переименовать или удалить на левой панели, но можно переименовать или удалить любую подгруппу. При удалении подгруппы ее сигналы перемещаются в группу верхнего уровня.
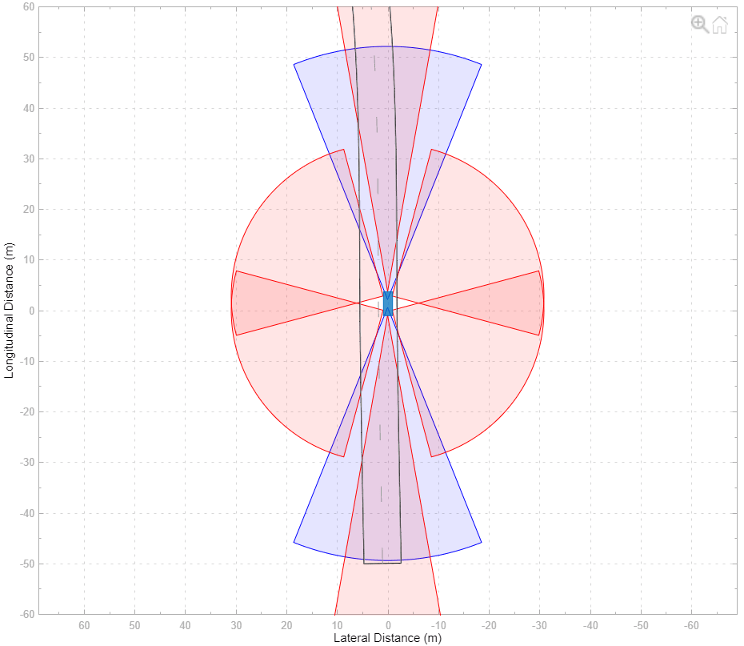
После выполнения моделирования измените модель и проверьте, как изменения влияют на визуализацию в области «Птичий глаз». Например, в подсистеме моделирования сенсора модели откройте два блока генератора обнаружения видения. Эти блоки имеют индексы датчиков 1 и 2соответственно. На вкладке Measurements каждого блока уменьшите значение параметра Maximum detection range (m) до 50. Чтобы увидеть, как изменяется покрытие датчика, повторно запустите моделирование.
При изменении параметров блока можно повторно запустить моделирование без повторного поиска сигналов. При добавлении или удалении блоков, портов или сигнальных линий перед повторным запуском моделирования необходимо снова нажать кнопку «Найти сигналы».
Сохраните и закройте модель. Настройки области «Птичий глаз» также сохраняются.
При повторном открытии модели и области «Птичий глаз» холст области первоначально остается пустым.
Щелкните Найти сигналы (Find Signals), чтобы снова найти сигналы и просмотреть сохраненные свойства сигнала. Например, при уменьшении диапазона обнаружения на предыдущем шаге на холсте области отображается этот уменьшенный диапазон.
По завершении моделирования модели удалите папку файла модели из пути поиска MATLAB.
rmpath(genpath(fullfile(matlabroot,'examples','driving')))
