Оценка параметров нелинейной модели ARX
sys = nlarx(data,orders)
sys = nlarx(data,regressors)regressors. Этот синтаксис используется при наличии линейных регрессоров, не имеющих последовательных лагов, или при наличии полиномиальных регрессоров, пользовательских регрессоров или обоих.
sys = nlarx(___,output_fcn)
sys = nlarx(data,linmodel,output_fcn)
sys = nlarx(data,sys0)sys0.
Используйте этот синтаксис для:
Оцените параметры модели, ранее созданной с помощью idnlarx конструктор. Перед оценкой можно настроить свойства модели с помощью точечной нотации.
Обновление параметров ранее оцененной модели для улучшения соответствия данным оценки. В этом случае алгоритм оценки использует параметры sys0 как первоначальные догадки.
Загрузите оценочные данные.
load twotankdata;Создание iddata объект из оценочных данных с временем выборки 0,2 секунды.
Ts = 0.2; z = iddata(y,u,Ts);
Оцените нелинейную модель ARX, используя порядки моделей ARX для задания регрессоров.
sysNL = nlarx(z,[4 4 1])
sysNL = Nonlinear ARX model with 1 output and 1 input Inputs: u1 Outputs: y1 Regressors: Linear regressors in variables y1, u1 List of all regressors Output function: Wavelet Network with 11 units Sample time: 0.2 seconds Status: Estimated using NLARX on time domain data "z". Fit to estimation data: 96.84% (prediction focus) FPE: 3.482e-05, MSE: 3.431e-05
sys использует значение по умолчанию wavenet функция в качестве функции вывода.
Для сравнения вычислите линейную модель ARX с теми же порядками моделей.
sysL = arx(z,[4 4 1]);
Сравните выходные данные модели с исходными данными.
compare(z,sysNL,sysL)

Нелинейная модель гораздо лучше подходит к данным, чем линейная модель.
Укажите линейный регрессор, эквивалентный матрице порядка модели ARX [4 4 1].
Матрица порядка [4 4 1] указывает, что наборы входных и выходных регрессоров содержат четыре регрессора с лагами в диапазоне от 1 до 4. Например, ) представляет второй входной регрессор.
Укажите имена вывода и ввода.
output_name = 'y1'; input_name = 'u1'; names = {output_name,input_name};
Укажите выходные и входные задержки.
output_lag = [1 2 3 4];
input_lag = [1 2 3 4];
lags = {output_lag,input_lag};Создайте объект линейного регрессора.
lreg = linearRegressor(names,lags)
lreg =
Linear regressors in variables y1, u1
Variables: {'y1' 'u1'}
Lags: {[1 2 3 4] [1 2 3 4]}
UseAbsolute: [0 0]
TimeVariable: 't'
Regressors described by this set
Загрузите оценочные данные и создайте объект iddata.
load twotankdata
z = iddata(y,u,0.2);Оцените нелинейную модель ARX.
sys = nlarx(z,lreg)
sys = Nonlinear ARX model with 1 output and 1 input Inputs: u1 Outputs: y1 Regressors: Linear regressors in variables y1, u1 List of all regressors Output function: Wavelet Network with 11 units Sample time: 0.2 seconds Status: Estimated using NLARX on time domain data "z". Fit to estimation data: 96.84% (prediction focus) FPE: 3.482e-05, MSE: 3.431e-05
Просмотр регрессоров
getreg(sys)
ans = 8×1 cell
{'y1(t-1)'}
{'y1(t-2)'}
{'y1(t-3)'}
{'y1(t-4)'}
{'u1(t-1)'}
{'u1(t-2)'}
{'u1(t-3)'}
{'u1(t-4)'}
Сравните выходные данные модели с оценочными данными.
compare(z,sys)

Создание массивов времени и данных.
dt = 0.01; t = 0:dt:10; y = 10*sin(2*pi*t)+rand(size(t));
Создание iddata объект без указанного входного сигнала.
z = iddata(y',[],dt);
Оцените нелинейную модель ARX.
sys = nlarx(z,2)
sys = Nonlinear time series model Outputs: y1 Regressors: Linear regressors in variables y1 List of all regressors Output function: Wavelet Network with 8 units Sample time: 0.01 seconds Status: Estimated using NLARX on time domain data "z". Fit to estimation data: 92.92% (prediction focus) FPE: 0.2568, MSE: 0.2507
Оценка нелинейной модели ARX, использующей функцию отображения sigmoidnet в качестве функции вывода.
Загрузка данных и их разделение на наборы данных оценки и проверки ze и zv.
load twotankdata.mat u y z = iddata(y,u,'Ts',0.2); ze = z(1:1500); zv = z(1501:end);
Сконфигурируйте sigmoidnet функция отображения. Зафиксируйте смещение равным 0,2, а количество единиц - равным 15.
s = sigmoidnet; s.Offset.Value = 0.2; s. NonlinearFcn.NumberOfUnits = 15;
Создайте спецификацию регрессора линейной модели, которая содержит четыре выходных регрессора и пять входных регрессоров.
reg1 = linearRegressor({'y1','u1'},{1:4,0:4});Создайте спецификацию регресса полиномиальной модели, которая содержит квадраты двух входных членов и трех выходных членов.
reg2 = polynomialRegressor({'y1','u1'},{1:2,0:2},2);Задайте параметры оценки для метода поиска и максимальное количество итераций.
opt = nlarxOptions('SearchMethod','fmincon')'; opt.SearchOptions.MaxIterations = 40;
Оцените нелинейную модель ARX.
sys = nlarx(ze,[reg1;reg2],s,opt);
Утвердить sys сравнивая смоделированный отклик модели с набором данных проверки.
compare(zv,sys)

Оцените линейную модель и улучшите модель, добавив treepartition функция вывода.
Загрузите оценочные данные.
load throttledata ThrottleData
Оценка линейной модели ARX linsys с заказами [2 2 1].
linsys = arx(ThrottleData,[2 2 1]);
Создание idnlarx модель шаблона, использующая linsys и определяет sigmoidnet в качестве функции вывода.
sys0 = idnlarx(linsys,treepartition);
Фиксация линейного компонента sys0 чтобы во время оценки линейная часть sys0 остается идентичным linsys.
sys0.OutputFcn.LinearFcn.Free = false;
Оценить свободные параметры sys0, которые являются нелинейными параметрами функции и смещением.
sys = nlarx(ThrottleData,sys0);
Сравните точность подгонки для линейной и нелинейной моделей.
compare(ThrottleData,linsys,sys)

Для создания пользовательского объекта сопоставления сети требуется определение определяемой пользователем единичной функции.
Определите функцию единицы измерения и сохраните ее как gaussunit.m.
% Copyright 2015 The MathWorks, Inc. function [f, g, a] = gaussunit(x) f = exp(-x.*x); if nargout>1 g = -2*x.*f; a = 0.2; end
Создание пользовательского объекта сопоставления сети с помощью дескриптора gaussunit функция.
H = @gaussunit; CNet = customnet(H);
Загрузите оценочные данные.
load iddata1;
Оцените нелинейную модель ARX с помощью пользовательской сети.
sys = nlarx(z1,[1 2 1],CNet)
sys = <strong>Nonlinear ARX model with 1 output and 1 input</strong> Inputs: u1 Outputs: y1 Regressors: Linear regressors in variables y1, u1 Output function: Custom Network with 10 units Sample time: 0.1 seconds Status: Estimated using NLARX on time domain data "z1". Fit to estimation data: 64.35% (prediction focus) FPE: 3.58, MSE: 2.465
Загрузите оценочные данные.
load motorizedcamera;Создание iddata объект.
z = iddata(y,u,0.02,'Name','Motorized Camera','TimeUnit','s');
z является iddata объект с шестью входами и двумя выходами.
Укажите заказы модели.
Orders = [ones(2,2),2*ones(2,6),ones(2,6)];
Укажите различные функции отображения для каждого выходного канала.
NL = [wavenet('NumberOfUnits',2),linear];Оцените нелинейную модель ARX.
sys = nlarx(z,Orders,NL)
sys = Nonlinear ARX model with 2 outputs and 6 inputs Inputs: u1, u2, u3, u4, u5, u6 Outputs: y1, y2 Regressors: Linear regressors in variables y1, y2, u1, u2, u3, u4, u5, u6 List of all regressors Output functions: Output 1: Wavelet Network with 2 units Output 2: Linear Function Sample time: 0.02 seconds Status: Estimated using NLARX on time domain data "Motorized Camera". Fit to estimation data: [98.72;98.77]% (prediction focus) FPE: 0.5719, MSE: 1.061
Загрузка данных оценки и создание iddata объект z. z содержит два выходных канала и шесть входных каналов.
load motorizedcamera;
z = iddata(y,u,0.02);Укажите набор линейных регрессоров, которые используют выходные и входные имена из z и содержит:
2 выходных регрессора с 1 запаздыванием.
6 пар входных регрессоров с 1 и 2 лагами.
names = [z.OutputName; z.InputName];
lags = {1,1,[1,2],[1,2],[1,2],[1,2],[1,2],[1,2]};
reg = linearRegressor(names,lags);Оценка нелинейной модели ARX с помощью sigmoidnet функция отображения с четырьмя блоками для всех выходных каналов.
sys = nlarx(z,reg,sigmoidnet(4))
sys = Nonlinear ARX model with 2 outputs and 6 inputs Inputs: u1, u2, u3, u4, u5, u6 Outputs: y1, y2 Regressors: Linear regressors in variables y1, y2, u1, u2, u3, u4, u5, u6 List of all regressors Output functions: Output 1: Sigmoid Network with 4 units Output 2: Sigmoid Network with 4 units Sample time: 0.02 seconds Status: Estimated using NLARX on time domain data "z". Fit to estimation data: [98.86;98.79]% (prediction focus) FPE: 2.641, MSE: 0.9233
Загрузка оценочных данных z1, который имеет один вход и один выход, и получить выходные и входные имена.
load iddata1 z1; names = [z1.OutputName z1.InputName]
names = 1×2 cell
{'y1'} {'u1'}
Определить L как набор линейных регрессоров, который представляет ), t-2) t-5).
L = linearRegressor(names,{1,[2 5]});Определить P в качестве полиномиального регрессора 2.
P = polynomialRegressor(names(1),1,2);
Определить C в качестве пользовательского регрессора t-3). Используйте анонимный дескриптор функции для определения этой функции.
C = customRegressor(names,{2 3},@(x,y)x.*y)C =
Custom regressor: y1(t-2).*u1(t-3)
VariablesToRegressorFcn: @(x,y)x.*y
Variables: {'y1' 'u1'}
Lags: {[2] [3]}
Vectorized: 1
TimeVariable: 't'
Regressors described by this set
Объединение регрессоров в векторе столбца R.
R = [L;P;C]
R=3×1 object
[3 1] array of linearRegressor, polynomialRegressor, customRegressor objects.
------------------------------------
1. Linear regressors in variables y1, u1
Variables: {'y1' 'u1'}
Lags: {[1] [2 5]}
UseAbsolute: [0 0]
TimeVariable: 't'
------------------------------------
2. Order 2 regressors in variables y1
Order: 2
Variables: {'y1'}
Lags: {[1]}
UseAbsolute: 0
AllowVariableMix: 0
AllowLagMix: 0
TimeVariable: 't'
------------------------------------
3. Custom regressor: y1(t-2).*u1(t-3)
VariablesToRegressorFcn: @(x,y)x.*y
Variables: {'y1' 'u1'}
Lags: {[2] [3]}
Vectorized: 1
TimeVariable: 't'
Regressors described by this set
Оценка нелинейной модели ARX с помощью R.
sys = nlarx(z1,R)
sys = Nonlinear ARX model with 1 output and 1 input Inputs: u1 Outputs: y1 Regressors: 1. Linear regressors in variables y1, u1 2. Order 2 regressors in variables y1 3. Custom regressor: y1(t-2).*u1(t-3) List of all regressors Output function: Wavelet Network with 1 unit Sample time: 0.1 seconds Status: Estimated using NLARX on time domain data "z1". Fit to estimation data: 59.73% (prediction focus) FPE: 3.356, MSE: 3.147
Просмотр полного набора регрессоров.
getreg(sys)
ans = 5×1 cell
{'y1(t-1)' }
{'u1(t-2)' }
{'u1(t-5)' }
{'y1(t-1)^2' }
{'y1(t-2).*u1(t-3)'}
Загрузите оценочные данные.
load iddata1;Создайте объект отображения сигмоидной сети с 10 единицами измерения и без линейного члена.
SN = sigmoidnet(10,false);
Оцените нелинейную модель ARX. Убедитесь, что модель не использует линейную функцию.
sys = nlarx(z1,[2 2 1],SN); sys.OutputFcn.LinearFcn.Use
ans = logical
0
Загрузите оценочные данные.
load throttledata;Уменьшите данные.
Tr = getTrend(ThrottleData); Tr.OutputOffset = 15; DetrendedData = detrend(ThrottleData,Tr);
Оцените линейную модель ARX.
LinearModel = arx(DetrendedData,[2 1 1]);
Оцените нелинейную модель ARX с помощью линейной модели. Порядки моделей, задержки и линейные параметры NonlinearModel являются производными от LinearModel.
NonlinearModel = nlarx(ThrottleData,LinearModel)
NonlinearModel = Nonlinear ARX model with 1 output and 1 input Inputs: Step Command Outputs: Throttle Valve Position Regressors: Linear regressors in variables Throttle Valve Position, Step Command List of all regressors Output function: Wavelet Network with 7 units Sample time: 0.01 seconds Status: Estimated using NLARX on time domain data "ThrottleData". Fit to estimation data: 99.03% (prediction focus) FPE: 0.1127, MSE: 0.1039
idnlarx ОбъектЗагрузите оценочные данные.
load iddata1;Создание idnlarx модель.
sys = idnlarx([2 2 1]);
Сконфигурируйте модель с помощью точечной нотации для:
Используйте объект сопоставления сети sigmoid.
Присвойте имя.
sys.Nonlinearity = 'sigmoidnet'; sys.Name = 'Model 1';
Оценка нелинейной модели ARX со структурой и свойствами, указанными в idnlarx объект.
sys = nlarx(z1,sys)
sys = Nonlinear ARX model with 1 output and 1 input Inputs: u1 Outputs: y1 Regressors: Linear regressors in variables y1, u1 List of all regressors Output function: Sigmoid Network with 10 units Name: Model 1 Sample time: 0.1 seconds Status: Estimated using NLARX on time domain data "z1". Fit to estimation data: 69.03% (prediction focus) FPE: 2.918, MSE: 1.86
Если оценка останавливается на локальном минимуме, можно нарушить модель с помощью init и переоценить модель.
Загрузите оценочные данные.
load iddata1;Оцените начальную нелинейную модель.
sys1 = nlarx(z1,[4 2 1],'sigmoidnet');Случайное возмущение параметров модели во избежание локальных минимумов.
sys2 = init(sys1);
Оцените новую нелинейную модель с возмущенными значениями.
sys2 = nlarx(z1,sys1);
Загрузите оценочные данные.
load twotankdata;Создание iddata объект из оценочных данных.
z = iddata(y,u,0.2);
Создание nlarxOptions набор опций, задающий цель минимизации ошибки моделирования и максимум 50 итераций оценки.
opt = nlarxOptions;
opt.Focus = 'simulation';
opt.SearchOptions.MaxIterations = 50;Оцените нелинейную модель ARX.
sys = nlarx(z,[4 4 1],'sigmoidnet',opt)sys = Nonlinear ARX model with 1 output and 1 input Inputs: u1 Outputs: y1 Regressors: Linear regressors in variables y1, u1 List of all regressors Output function: Sigmoid Network with 10 units Sample time: 0.2 seconds Status: Estimated using NLARX on time domain data "z". Fit to estimation data: 88.79% (simulation focus) FPE: 3.341e-05, MSE: 0.0004307
Загрузите данные примера регуляризации.
load regularizationExampleData.mat nldata;
Создать sigmoidnet сопоставить объект с 30 единицами измерения и указать порядки моделей.
MO = sigmoidnet(30); Orders = [1 2 1];
Создайте набор опций оценки и задайте для метода поиска оценки значение lm.
opt = nlarxOptions('SearchMethod','lm');
Оценка нерегулируемой модели.
sys = nlarx(nldata,Orders,MO,opt);
Конфигурирование регуляризации Lambda параметр.
opt.Regularization.Lambda = 1e-8;
Оценка регуляризованной модели.
sysR = nlarx(nldata,Orders,MO,opt);
Сравните две модели.
compare(nldata,sys,sysR)

Большой отрицательный результат подгонки для нерегулируемой модели указывает на плохую подгонку к данным. Оценка регуляризованной модели дает значительно лучший результат.
Нелинейная модель ARX состоит из регрессоров модели и выходной функции. Функция вывода включает в себя линейные и нелинейные функции, которые действуют на регрессоры модели для получения выходного сигнала модели и фиксированного смещения для этого выходного сигнала. Эта блок-схема представляет структуру нелинейной модели ARX в сценарии моделирования.
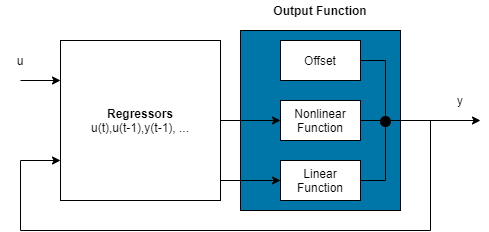
Программное обеспечение вычисляет выход нелинейной модели ARX y в два этапа:
Он вычисляет значения регрессора из текущих и прошлых входных значений и прошлых выходных данных.
В простейшем случае регрессоры представляют собой запаздывающие входы и выходы, такие как u (t-1) и y (t-3). Такие регрессоры называются линейными регрессорами. Линейные регрессоры задаются с помощью linearRegressor объект. Можно также задать линейные регрессоры, используя линейные порядки моделей ARX в качестве входного аргумента. Дополнительные сведения см. в разделе Нелинейные заказы модели ARX и задержка. Однако этот второй подход ограничивает набор регрессоров линейными регрессорами с последовательными задержками. Для создания полиномиальных регрессоров используйте polynomialRegressor объект. Можно также указать пользовательские регрессоры, которые являются нелинейными функциями отложенных входов и выходов. Например, u (t-1) y (t-3) является пользовательским регрессором, который умножает экземпляры ввода и вывода вместе. Укажите пользовательские регрессоры с помощью customRegressor объект.
Можно назначить любой из регрессоров в качестве входных данных линейному функциональному блоку выходной функции, нелинейному функциональному блоку или и тому и другому.
Он отображает регрессоры на выходные данные модели с помощью функционального блока вывода. Выходной функциональный блок может включать в себя линейные и нелинейные блоки параллельно. Например, рассмотрим следующее уравнение:
Q (x − r)) + d
Здесь x - вектор регрессоров, а r - среднее значение x. r) + y0 - выход линейного функционального (x − r)) + y0 представляет выход нелинейного функционального блока. Q - это проекционная матрица, которая делает вычисления хорошо обусловленными. d - скалярное смещение, которое добавляется к объединенным выходам линейного и нелинейного блоков. Точная форма F (x) зависит от выбора функции вывода. Можно выбрать из доступных объектов отображения, таких как сети с древовидными разделами, вейвлет-сети и многослойные нейронные сети. Можно также исключить линейный или нелинейный функциональный блок из функции вывода.
При оценке нелинейной модели ARX программное обеспечение вычисляет значения параметров модели, такие как L, r, d, Q, и другие параметры, определяющие g.
Результирующими нелинейными моделями ARX являются idnlarx объекты, хранящие все данные модели, включая регрессоры модели и параметры выходной функции. Дополнительные сведения об этих объектах см. в разделе Нелинейные структуры модели.
aic | fpe | goodnessOfFit | idnlarx | isnlarx | linearRegressor | nlarxOptions | polynomialRegressor
