Нелинейная модель ARX
Один idnlarx модель представляет нелинейную модель ARX, которая является расширением линейной структуры ARX и содержит линейные и нелинейные функции.
Нелинейная модель ARX состоит из регрессоров модели и выходной функции. Функция вывода включает в себя линейные и нелинейные функции, которые действуют на регрессоры модели для получения выходного сигнала модели и фиксированного смещения для этого выходного сигнала. Эта блок-схема представляет структуру нелинейной модели ARX в сценарии моделирования.
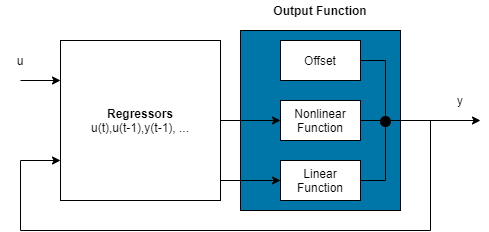
Программное обеспечение вычисляет выход нелинейной модели ARX y в два этапа:
Он вычисляет значения регрессора из текущих и прошлых входных значений и прошлых выходных данных.
В простейшем случае регрессоры представляют собой запаздывающие входы и выходы, такие как u (t-1) и y (t-3). Такие регрессоры называются линейными регрессорами. Линейные регрессоры задаются с помощью linearRegressor объект. Можно также задать линейные регрессоры, используя линейные порядки моделей ARX в качестве входного аргумента. Дополнительные сведения см. в разделе Нелинейные заказы модели ARX и задержка. Однако этот второй подход ограничивает набор регрессоров линейными регрессорами с последовательными задержками. Для создания полиномиальных регрессоров используйте polynomialRegressor объект. Можно также указать пользовательские регрессоры, которые являются нелинейными функциями отложенных входов и выходов. Например, u (t-1) y (t-3) является пользовательским регрессором, который умножает экземпляры ввода и вывода вместе. Укажите пользовательские регрессоры с помощью customRegressor объект.
Можно назначить любой из регрессоров в качестве входных данных линейному функциональному блоку выходной функции, нелинейному функциональному блоку или и тому и другому.
Он отображает регрессоры на выходные данные модели с помощью функционального блока вывода. Выходной функциональный блок может включать в себя линейные и нелинейные блоки параллельно. Например, рассмотрим следующее уравнение:
Q (x − r)) + d
Здесь x - вектор регрессоров, а r - среднее значение x. r) + y0 - выход линейного функционального (x − r)) + y0 представляет выход нелинейного функционального блока. Q - это проекционная матрица, которая делает вычисления хорошо обусловленными. d - скалярное смещение, которое добавляется к объединенным выходам линейного и нелинейного блоков. Точная форма F (x) зависит от выбора функции вывода. Можно выбрать из доступных объектов отображения, таких как сети с древовидными разделами, вейвлет-сети и многослойные нейронные сети. Можно также исключить линейный или нелинейный функциональный блок из функции вывода.
При оценке нелинейной модели ARX программное обеспечение вычисляет значения параметров модели, такие как L, r, d, Q, и другие параметры, определяющие g.
Результирующими нелинейными моделями ARX являются idnlarx объекты, хранящие все данные модели, включая регрессоры модели и параметры выходной функции. Дополнительные сведения об этих объектах см. в разделе Нелинейные структуры модели.
Для получения дополнительной информации о idnlarx см. раздел Что такое нелинейные модели ARX?.
Для idnlarx свойства объекта см. в разделе Свойства.
Вы можете получить idnlarx объект одним из двух способов.
sys = idnlarx(output_name,input_name,orders)
sys = idnlarx(output_name,input_name,Regressors)output_name и input_name, соответственно, и набор регрессоров в регрессорах, который содержит любую комбинацию линейных, полиномиальных и пользовательских регрессоров. Программные конструкции sys с использованием вейвлет-сети по умолчанию ('wavenet') объект отображения для функции вывода.
sys = idnlarx(linmodel)linmodel для извлечения определенных свойств, таких как имена, единицы измерения и время выборки, а также для инициализации значений линейных коэффициентов модели. Этот синтаксис используется при создании нелинейной модели ARX в качестве расширения или улучшения существующей линейной модели.
sys = idnlarx(___,Name,Value)idnlarx с использованием одного или нескольких аргументов «имя-значение».
Сведения о функциях объекта для idnlarx, см. Нелинейные модели ARX.
customRegressor | getreg | idnlarx/findop | linear | linearize | linearRegressor | nlarx | pem | polynomialRegressor | sigmoidnet | wavenet
