Реализуйте кватернионное представление уравнений движения с шестью степенями свободы относительно ветряных осей
Аэрокосмический Уравнения Движения/ 6DOF
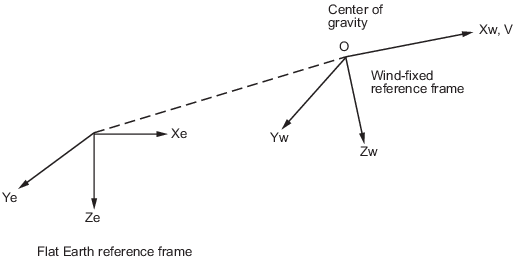
Блок 6DOF Wind (Quaternion) рассматривает вращение ветряной фиксированной координатной системы координат (Xw, Yw, Zw) вокруг плоской системы отсчета Земли (Xe, Ye, Ze). Для получения дополнительной информации о ветряной фиксированной системе координат см. «Алгоритмы».
Аэрокосмическая Blockset™ использует кватернионы, которые заданы с помощью скалярно-первого соглашения.
Блок принимает, что приложенные силы действуют в центре тяжести тела, и что масса и инерция постоянны.
Источником ветряно-фиксированной координатной системы координат является центр тяжести тела, и тело принято твердым, что исключает необходимость рассматривать силы, действующие между отдельными элементами массы. Плоская система координат Земли считается инерционной, отличное приближение, которое позволяет пренебрегать силами, обусловленными движением Земли относительно «неподвижных звёзд».
Поступательное движение ветряной фиксированной координатной системы координат приведено ниже, где приложенные силы [Fx Fy Fz]T находятся в ветряной системе координат, и масса m тела принята постоянной.
Динамика вращения неподвижной системы координат приведена ниже, где приложенные моменты [L M N]T, и тензор инерции I относительно origin O. Тензор инерции I легче определить в фиксированной системе координат тела.
Интегрирование скорости изменения вектора кватерниона приведено ниже.
[1] Стивенс, Брайан и Фрэнк Льюис. Управление и симуляция самолета. Нью-Йорк: John Wiley & Sons, 1992.
6DOF (Euler Angles) | 6DOF (Quaternion) | 6DOF ECEF (Quaternion) | 6DOF Wind (Wind Angles) | Custom Variable Mass 6DOF (Euler Angles) | Custom Variable Mass 6DOF (Quaternion) | Custom Variable Mass 6DOF ECEF (Quaternion) | Custom Variable Mass 6DOF Wind (Quaternion) | Custom Variable Mass 6DOF Wind (Wind Angles) | Simple Variable Mass 6DOF (Euler Angles) | Simple Variable Mass 6DOF (Quaternion) | Simple Variable Mass 6DOF ECEF (Quaternion) | Simple Variable Mass 6DOF Wind (Quaternion) | Simple Variable Mass 6DOF Wind (Wind Angles)
