Визуализация покрытий, обнаружений и дорожек датчика
Этот Bird's-Eye Scope визуализирует аспекты сценария вождения, найденного в вашем Simulink® модель.
Используя возможности, можно:
Осмотрите зоны действия радаров, датчиков зрения и лидара.
Анализ обнаружений датчиков актёров, контуров дорог и контуров маршрута.
Анализ результатов отслеживания движущихся актёров в рамках сценария.
Чтобы начать, откройте возможности и нажмите Find Signals. Возможности обновляют блок, находит сигналы, представляющие аспекты сценария вождения, организует сигналы в группы и отображает сигналы. Затем можно анализировать сигналы во время моделирования, организовывать сигналы в новые группы и изменять графическое отображение сигналов.
Для получения дополнительной информации об использовании возможностей см. «Визуализация данных о датчике и дорожек в Bird ' s-Eye Scope».
Simulink Toolstrip:
На вкладке Simulation, под Review Results, нажмите Bird's-Eye Scope.
На вкладке Apps, под Signal Processing and Wireless Communications, нажмите Bird's-Eye Scope.
Longitudinal axis limits - Пределы продольной оси[-60,60] (по умолчанию) | вектор [min, max]Продольные пределы по осям, заданные как вектор [min, max].
Настраиваемый: Да
Lateral axis limits - Пределы боковой оси[-30,30] (по умолчанию) | вектор [min, max]Боковые пределы по осям, заданный как вектор [min, max].
Настраиваемый: Да
Track position selector - Матрица выбора для извлечения позиций отслеживаемых объектов[1,0,0,0,0,0; 0,0,1,0,0,0] (по умолчанию) | 2-байт- n матрицу нулей и таковыхМатрица выбора, используемая для извлечения положений треков, выводимых блоком Multi-Object Tracker. Возможности извлекают положения из векторов состояний треков, которые хранятся в State поля выходных структур дорожек. Если вы задаете неправильный выбор, область возможностей отображает неправильные положения дорожек.
Задайте Track position selector как 2-байтовую n матрицу нулей и таковых, где n - размер векторов состояний во всех треках. Эти векторы состояния содержат информацию о положении, скорости, ускорении и другом состоянии отслеживаемых объектов.
Матрица выбора по умолчанию выбирает положения дорожек из 3-D вектора состояния постоянной скорости вида [x;vx;y;vy;z;vz]. Для каждой дорожки возможности умножают матрицу выбора на вектор состояния, чтобы получить x -position и y -position, как показано здесь:
[1,0,0,0,0,0; 0,0,1,0,0,0] * [x;vx;y;vy;z;vz] = [x;y]
Для MATLAB® примеры кода, иллюстрирующие этот процесс выбора, см. getTrackPositions функции и multiObjectTracker объект.
Форматы вектора состояния и соответствующей матрицы выбора зависят от фильтра Калмана, который используется блоком Multi-Object Tracker для отслеживания объектов. Предположим, что блок Multi-Object Tracker инициализирован, чтобы использовать 2-D линейный фильтр Калмана с постоянной скоростью, где параметр Filter initialization function name блока установлен в initcvkf функция. Для этого типа фильтра состояния дорожки имеют вид [x;vx;y;vy]. Чтобы визуализировать положения треков, выводимых этим блоком, установите Track position selector в [1,0,0,0; 0,0,1,0].
Настраиваемый: Нет
Track velocity selector - Матрица выбора, используемая для извлечения скоростей отслеживаемых объектов[0,1,0,0,0,0; 0,0,0,1,0,0] (по умолчанию) | 2-байт- n матрицу нулей и таковыхМатрица выбора, используемая для извлечения скоростей треков, выводимых блоком Multi-Object Tracker. Возможности извлекают скорости из векторов состояний треков, которые хранятся в State поля выходных структур дорожек. Если вы задаете неправильный выбор, то область возможностей отображает неправильные скорости дорожки.
Задайте Track velocity selector как 2-байтовую n матрицу нулей и таковых, где n - размер векторов состояний во всех треках. Эти векторы состояния содержат информацию о положении, скорости, ускорении и другом состоянии отслеживаемых объектов.
Матрица выбора по умолчанию выбирает скорости дорожки из 3-D вектора состояния постоянной скорости вида [x;vx;y;vy;z;vz]. Для каждой дорожки возможности умножают матрицу выбора на вектор состояния, чтобы получить скорости дорожки в x -направлении, vx, и y -направление, vy, как показано здесь:
[0,1,0,0,0,0; 0,0,0,1,0,0] * [x;vx;y;vy;z;vz] = [vx;vy]
Для примеров кода MATLAB, иллюстрирующих этот процесс выбора, смотрите getTrackVelocities функции и multiObjectTracker объект.
Форматы вектора состояния и соответствующей матрицы выбора зависят от фильтра Калмана, который используется блоком Multi-Object Tracker для отслеживания объектов. Предположим, что блок Multi-Object Tracker инициализирован, чтобы использовать 2-D линейный фильтр Калмана с постоянной скоростью, где параметр Filter initialization function name блока установлен в initcvkf функция. Для этого типа фильтра состояния дорожки имеют вид [x;vx;y;vy]. Чтобы визуализировать скорости треков, выводимых этим блоком, установите Track velocity selector в [0,1,0,0; 0,0,0,1].
Настраиваемый: Нет
Display short signal names - Отображать имена сигналов без информации о путиon (по умолчанию) | offВыберите этот параметр, чтобы отобразить краткие имена сигналов (сигналы без информации о пути).
Очистите этот параметр, чтобы отобразить длинные имена сигналов (сигналы с информацией о пути).
Рассмотрим сигнал VisionDetection в подсистеме Sensor Simulation. Когда вы выбираете этот параметр, краткое имя, VisionDetection, отображается. Когда вы очищаете этот параметр, длинное имя, Sensor Simulation/VisionDetection, отображается.
Настраиваемый: Да
Alpha - Прозрачность зоны охвата0.1 (по умолчанию) | действительный скаляр в области значений [0, 1]Прозрачность зоны покрытия, заданная как действительный скаляр в области значений [0, 1]. Значение 0 делает зону покрытия полностью прозрачной. Значение 1 делает зону покрытия полностью непрозрачной.
Это свойство доступно только для сигналов в группе Sensor Coverage.
Настраиваемый: Да
Velocity Scaling - Масштабный коэффициент для длины амплитуды векторов скорости1 (по умолчанию) | действительный скаляр в области значений [0, 20]Масштабный коэффициент для длины величины векторов скорости, заданный как действительный скаляр в области значений [0, 20]. Возможности отображают значение вектора амплитуды M качестве × Velocity Scaling, где M - величина скорости.
Это свойство доступно только для сигналов в Detections или Tracks группах.
Настраиваемый: Да
Общие ограничения
Ссылочные модели не поддерживаются. Чтобы визуализировать сигналы, которые находятся в пределах ссылочных моделей, переместите выход этих сигналов в модель верхнего уровня.
Быстрый режим Accelerator не поддерживается.
Если вы инициализируете модель в быстром перезапуске, то после первого раза моделирования кнопка Find Signals отключается. Чтобы включить Find Signals снова, на вкладке Debug панели инструментов Simulink, нажмите Fast Restart.
Ограничения блоков считывателя сценариев
Этот Bird's-Eye Scope не поддерживает визуализацию в модели, которая содержит:
Более одного блока Scenario Reader.
Блок Scenario Reader в невиртуальной подсистеме, такой как атомарная или активированная подсистема.
Блок Scenario Reader, который сконфигурирован для вывода актёров и контуров маршрута в мировых координатах (Coordinate system of outputs значение параметра установлено на World Coordinates).
Для блоков Scenario Reader, в которых вы задаете автомобиль , оборудованный датчиком, используя порт Ego Vehicle входа, сигнал автомобиля , оборудованного датчиком должен быть подключен непосредственно к блоку. Визуализация сигналов автомобиля , оборудованного датчиком, которые выводятся из невиртуальной подсистемы или ссылочных моделей, не поддерживается.
3D ограничения блоков симуляции
Визуализация дорог, полос и актёров из Simulation 3D Scene Configuration блоков не поддерживается. Если ваш блок содержит Simulation 3D Scene Configuration блок, то Bird's-Eye Scope все еще отображает автомобиль , оборудованный датчиком, но он имеет транспортное средство размерностей по умолчанию.
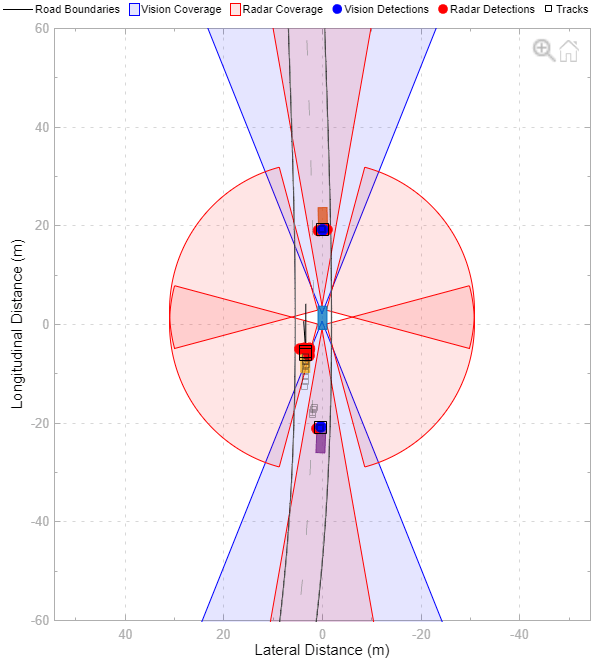
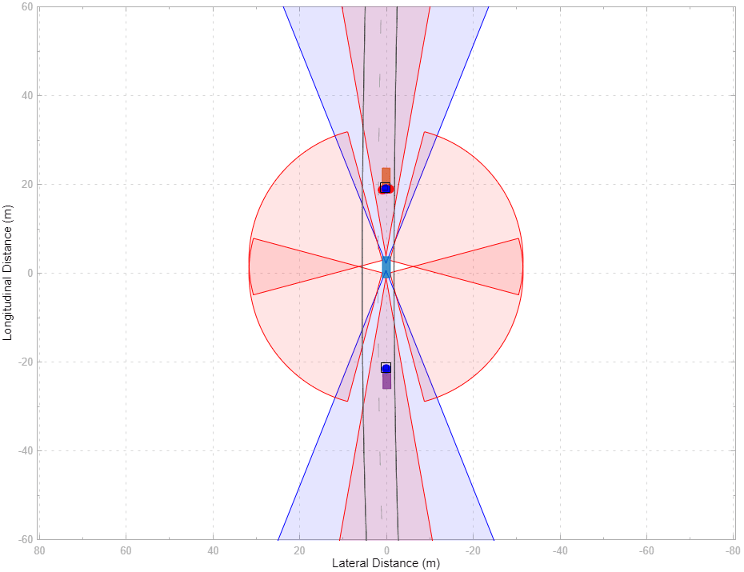
В Bird's-Eye Scope вид по умолчанию отображает сценарий вождения в vehicle coordinates. Во время симуляции это представление отображает сценарий с точки зрения автомобиля , оборудованного датчиком. Используйте это представление для просмотра аспектов сценария в непосредственной близости от автомобиля , оборудованного датчиком.
Можно также просмотреть сценарий вождения в world coordinates. На панели инструментов возможностей щелкните World Coordinates, чтобы открыть World Coordinates View окно. Это окно используется для просмотра сценария в целом. Можно также использовать это представление для просмотра траекторий актёров, которые не находятся в непосредственной близости от автомобиля , оборудованного датчиком.
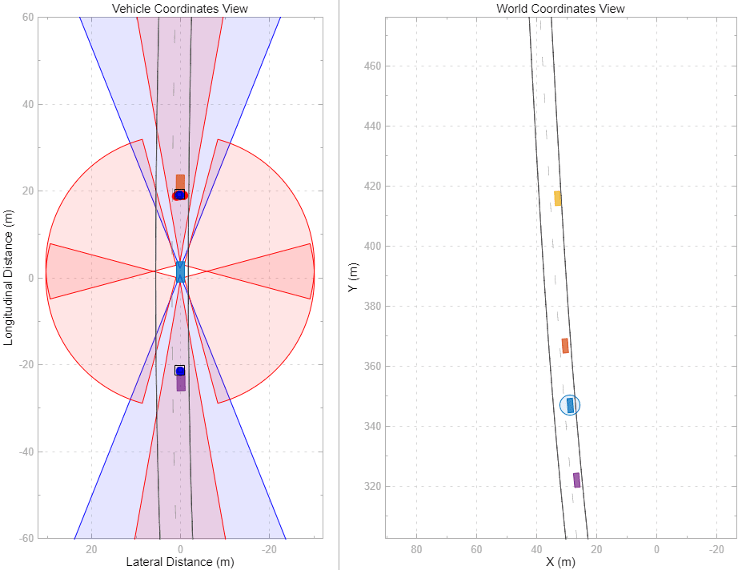
Чтобы отобразить дороги и полосы в World Coordinates View, нажмите Find Signals. Чтобы отобразить автомобиль , оборудованный датчиком и других актёров в сценарии, запустите симуляцию. Это представление не отображает обнаружения, дорожки, зоны покрытия датчика и другие применимые сигналы. Просмотреть эти сигналы можно только в Vehicle Coordinates View окне.
Примечание
В World Coordinates View окне круг вокруг автомобиля , оборудованного датчиком подсвечивает расположение транспортного средства в сценарии. Это не зона покрытия датчика.
Чтобы найти источник сигнала в модели, в левой панели области видимости щелкните правой кнопкой мыши сигнал и выберите Highlight in Model.
Можно показывать или скрывать сигналы во время симуляции. Например, чтобы скрыть покрытие датчика, сначала выберите его на левой панели. Затем на вкладке Properties снимите флажок Show Sensor Coverage.
Когда вы снова открываете возможности после сохранения и закрытия модели, холст возможностей первоначально пуст. Нажмите Find Signals, чтобы снова найти сигналы. Сигналы имеют те же свойства, что и при последнем сохранении модели.
Если симуляция запускается слишком быстро, можно замедлить ее с помощью шага симуляции. На вкладке Simulation панели инструментов Simulink выберите Run > Simulation Pacing. Затем установите флажок Включить темп для замедления симуляции и уменьшите время симуляции до значения, меньшего, чем значение по умолчанию, для одной секунды в секунду на стенку.
Чтобы лучше просмотреть сценарий, можно панорамировать и масштабировать в Vehicle Coordinates View и World Coordinates View окнах. Чтобы вернуться к отображению по умолчанию любого из окон, в правом верхнем углу этого окна нажмите кнопку «Главная страница».![]()
Detection Concatenation | Driving Radar Data Generator | Lidar Point Cloud Generator | Multi-Object Tracker | Scenario Reader | Simulation 3D Lidar | Simulation 3D Probabilistic Radar | Simulation 3D Vision Detection Generator | Vision Detection Generator
