Оценка параметров нелинейной модели ARX
sys = nlarx(data,orders)
sys = nlarx(data,regressors)regressors. Используйте этот синтаксис, когда у вас есть линейные регрессоры, которые имеют непоследовательные лаги, или когда у вас также есть полиномиальные регрессоры, пользовательские регрессоры или оба.
sys = nlarx(___,output_fcn)
sys = nlarx(data,linmodel,output_fcn)
sys = nlarx(data,sys0)sys0.
Используйте этот синтаксис для:
Оцените параметры модели, ранее созданной с помощью idnlarx конструктор. До оценки можно сконфигурировать свойства модели с помощью записи через точку.
Обновите параметры ранее оцененной модели, чтобы улучшить подгонку к данным оценки. В этом случае алгоритм оценки использует параметры sys0 как исходные догадки.
Загрузите данные оценки.
load twotankdata;Создайте iddata объект из данных оценки со шаг расчета 0,2 секунды.
Ts = 0.2; z = iddata(y,u,Ts);
Оцените нелинейную модель ARX с помощью порядков модели ARX, чтобы задать регрессоры.
sysNL = nlarx(z,[4 4 1])
sysNL = Nonlinear ARX model with 1 output and 1 input Inputs: u1 Outputs: y1 Regressors: Linear regressors in variables y1, u1 List of all regressors Output function: Wavelet Network with 11 units Sample time: 0.2 seconds Status: Estimated using NLARX on time domain data "z". Fit to estimation data: 96.84% (prediction focus) FPE: 3.482e-05, MSE: 3.431e-05
sys использует значение по умолчанию wavenet функция как выходная функция.
Для сравнения вычислите линейную модель ARX с теми же порядками моделей.
sysL = arx(z,[4 4 1]);
Сравните выходы модели с исходными данными.
compare(z,sysNL,sysL)

Нелинейная модель намного лучше соответствует данным, чем линейная модель.
Задайте линейный регрессор, который эквивалентен матрице порядка ARX-модели [4 4 1].
Матрица порядка [4 4 1] указывает, что и входной, и выход наборы регрессоров содержат четыре регрессора с лагами в диапазоне от 1 до 4. Для примера, представляет второй входной регрессор.
Задайте выходные и входные имена.
output_name = 'y1'; input_name = 'u1'; names = {output_name,input_name};
Задайте выходные и входные лаги.
output_lag = [1 2 3 4];
input_lag = [1 2 3 4];
lags = {output_lag,input_lag};Создайте объект линейного регрессора.
lreg = linearRegressor(names,lags)
lreg =
Linear regressors in variables y1, u1
Variables: {'y1' 'u1'}
Lags: {[1 2 3 4] [1 2 3 4]}
UseAbsolute: [0 0]
TimeVariable: 't'
Regressors described by this set
Загрузите данные оценки и создайте объект iddata.
load twotankdata
z = iddata(y,u,0.2);Оцените нелинейную модель ARX.
sys = nlarx(z,lreg)
sys = Nonlinear ARX model with 1 output and 1 input Inputs: u1 Outputs: y1 Regressors: Linear regressors in variables y1, u1 List of all regressors Output function: Wavelet Network with 11 units Sample time: 0.2 seconds Status: Estimated using NLARX on time domain data "z". Fit to estimation data: 96.84% (prediction focus) FPE: 3.482e-05, MSE: 3.431e-05
Просмотр регрессоров
getreg(sys)
ans = 8×1 cell
{'y1(t-1)'}
{'y1(t-2)'}
{'y1(t-3)'}
{'y1(t-4)'}
{'u1(t-1)'}
{'u1(t-2)'}
{'u1(t-3)'}
{'u1(t-4)'}
Сравните выход модели с данными оценки.
compare(z,sys)

Создайте время и массивы данных.
dt = 0.01; t = 0:dt:10; y = 10*sin(2*pi*t)+rand(size(t));
Создайте iddata объект без заданного входного сигнала.
z = iddata(y',[],dt);
Оцените нелинейную модель ARX.
sys = nlarx(z,2)
sys = Nonlinear time series model Outputs: y1 Regressors: Linear regressors in variables y1 List of all regressors Output function: Wavelet Network with 8 units Sample time: 0.01 seconds Status: Estimated using NLARX on time domain data "z". Fit to estimation data: 92.92% (prediction focus) FPE: 0.2568, MSE: 0.2507
Оцените нелинейную модель ARX, которая использует функцию отображения sigmoidnet как свою выходную функцию.
Загрузите данные и разделите их на наборы данных оценки и валидации ze и zv.
load twotankdata.mat u y z = iddata(y,u,'Ts',0.2); ze = z(1:1500); zv = z(1501:end);
Сконфигурируйте sigmoidnet функция отображения. Установите смещение равным 0,2, а количество модулей - 15.
s = sigmoidnet; s.Offset.Value = 0.2; s. NonlinearFcn.NumberOfUnits = 15;
Создайте линейную модель спецификации регрессора, которая содержит четыре выходных регрессора и пять входных регрессоров.
reg1 = linearRegressor({'y1','u1'},{1:4,0:4});Создайте спецификацию регрессора полиномиальной модели, которая содержит квадраты двух входных членов и трех выходных членов.
reg2 = polynomialRegressor({'y1','u1'},{1:2,0:2},2);Установите опции оценки для метода поиска и максимального количества итераций.
opt = nlarxOptions('SearchMethod','fmincon')'; opt.SearchOptions.MaxIterations = 40;
Оцените нелинейную модель ARX.
sys = nlarx(ze,[reg1;reg2],s,opt);
Валидация sys путем сравнения моделируемой характеристики модели с набором данных валидации.
compare(zv,sys)

Оцените линейную модель и улучшите модель путем добавления treepartition выходная функция.
Загрузите данные оценки.
load throttledata ThrottleData
Оцените линейную модель ARX linsys с порядками [2 2 1].
linsys = arx(ThrottleData,[2 2 1]);
Создайте idnlarx модель шаблона, которая использует linsys и определяет sigmoidnet как выходная функция.
sys0 = idnlarx(linsys,treepartition);
Исправьте линейный компонент sys0 так, что во время оценки линейный фрагмент sys0 остается идентичным linsys.
sys0.OutputFcn.LinearFcn.Free = false;
Оцените свободные параметры sys0, которые являются параметрами нелинейной функции и смещением.
sys = nlarx(ThrottleData,sys0);
Сравните точности аппроксимации для линейной и нелинейной моделей.
compare(ThrottleData,linsys,sys)

Для генерации пользовательского объекта отображения сетей требуется определение пользовательской единичной функции.
Определите функцию модуля и сохраните ее как gaussunit.m.
% Copyright 2015 The MathWorks, Inc. function [f, g, a] = gaussunit(x) f = exp(-x.*x); if nargout>1 g = -2*x.*f; a = 0.2; end
Создайте пользовательский объект сопоставления сетей с помощью указателя на gaussunit функция.
H = @gaussunit; CNet = customnet(H);
Загрузите данные оценки.
load iddata1;
Оцените нелинейную модель ARX с помощью пользовательской сети.
sys = nlarx(z1,[1 2 1],CNet)
sys = <strong>Nonlinear ARX model with 1 output and 1 input</strong> Inputs: u1 Outputs: y1 Regressors: Linear regressors in variables y1, u1 Output function: Custom Network with 10 units Sample time: 0.1 seconds Status: Estimated using NLARX on time domain data "z1". Fit to estimation data: 64.35% (prediction focus) FPE: 3.58, MSE: 2.465
Загрузите данные оценки.
load motorizedcamera;Создайте iddata объект.
z = iddata(y,u,0.02,'Name','Motorized Camera','TimeUnit','s');
z является iddata объект с шестью входами и двумя выходами.
Задайте порядки моделей.
Orders = [ones(2,2),2*ones(2,6),ones(2,6)];
Задайте различные функции отображения для каждого выходного канала.
NL = [wavenet('NumberOfUnits',2),linear];Оцените нелинейную модель ARX.
sys = nlarx(z,Orders,NL)
sys = Nonlinear ARX model with 2 outputs and 6 inputs Inputs: u1, u2, u3, u4, u5, u6 Outputs: y1, y2 Regressors: Linear regressors in variables y1, y2, u1, u2, u3, u4, u5, u6 List of all regressors Output functions: Output 1: Wavelet Network with 2 units Output 2: Linear Function Sample time: 0.02 seconds Status: Estimated using NLARX on time domain data "Motorized Camera". Fit to estimation data: [98.72;98.77]% (prediction focus) FPE: 0.5719, MSE: 1.061
Загрузите данные оценки и создайте iddata z объекта. z содержит два выходных канала и шесть входных каналов.
load motorizedcamera;
z = iddata(y,u,0.02);Задайте набор линейных регрессоров, которые используют выходные и входные имена от z и содержит:
2 выходных регрессора с 1 задержкой.
6 входных пар регрессора с 1 и 2 лагами.
names = [z.OutputName; z.InputName];
lags = {1,1,[1,2],[1,2],[1,2],[1,2],[1,2],[1,2]};
reg = linearRegressor(names,lags);Оцените нелинейную модель ARX с помощью sigmoidnet функция отображения с четырьмя модулями для всех выходных каналов.
sys = nlarx(z,reg,sigmoidnet(4))
sys = Nonlinear ARX model with 2 outputs and 6 inputs Inputs: u1, u2, u3, u4, u5, u6 Outputs: y1, y2 Regressors: Linear regressors in variables y1, y2, u1, u2, u3, u4, u5, u6 List of all regressors Output functions: Output 1: Sigmoid Network with 4 units Output 2: Sigmoid Network with 4 units Sample time: 0.02 seconds Status: Estimated using NLARX on time domain data "z". Fit to estimation data: [98.86;98.79]% (prediction focus) FPE: 2.641, MSE: 0.9233
Загрузите данные оценки z1, который имеет один вход и один выход, и получают выходные и входные имена.
load iddata1 z1; names = [z1.OutputName z1.InputName]
names = 1×2 cell
{'y1'} {'u1'}
Задайте L как набор линейных регрессоров, который представляет , , и .
L = linearRegressor(names,{1,[2 5]});Задайте P как полиномиальный регрессор .
P = polynomialRegressor(names(1),1,2);
Задайте C как пользовательский регрессор . Используйте указатель анонимной функции, чтобы задать эту функцию.
C = customRegressor(names,{2 3},@(x,y)x.*y)C =
Custom regressor: y1(t-2).*u1(t-3)
VariablesToRegressorFcn: @(x,y)x.*y
Variables: {'y1' 'u1'}
Lags: {[2] [3]}
Vectorized: 1
TimeVariable: 't'
Regressors described by this set
Объедините регрессоры в вектор-столбец R.
R = [L;P;C]
R=3×1 object
[3 1] array of linearRegressor, polynomialRegressor, customRegressor objects.
------------------------------------
1. Linear regressors in variables y1, u1
Variables: {'y1' 'u1'}
Lags: {[1] [2 5]}
UseAbsolute: [0 0]
TimeVariable: 't'
------------------------------------
2. Order 2 regressors in variables y1
Order: 2
Variables: {'y1'}
Lags: {[1]}
UseAbsolute: 0
AllowVariableMix: 0
AllowLagMix: 0
TimeVariable: 't'
------------------------------------
3. Custom regressor: y1(t-2).*u1(t-3)
VariablesToRegressorFcn: @(x,y)x.*y
Variables: {'y1' 'u1'}
Lags: {[2] [3]}
Vectorized: 1
TimeVariable: 't'
Regressors described by this set
Оцените нелинейную модель ARX с R.
sys = nlarx(z1,R)
sys = Nonlinear ARX model with 1 output and 1 input Inputs: u1 Outputs: y1 Regressors: 1. Linear regressors in variables y1, u1 2. Order 2 regressors in variables y1 3. Custom regressor: y1(t-2).*u1(t-3) List of all regressors Output function: Wavelet Network with 1 unit Sample time: 0.1 seconds Status: Estimated using NLARX on time domain data "z1". Fit to estimation data: 59.73% (prediction focus) FPE: 3.356, MSE: 3.147
Просмотрите полный набор регрессоров.
getreg(sys)
ans = 5×1 cell
{'y1(t-1)' }
{'u1(t-2)' }
{'u1(t-5)' }
{'y1(t-1)^2' }
{'y1(t-2).*u1(t-3)'}
Загрузите данные оценки.
load iddata1;Создайте объект отображения сигмоидной сети с 10 модулями и без линейного термина.
SN = sigmoidnet(10,false);
Оцените нелинейную модель ARX. Подтвердите, что модель не использует линейную функцию.
sys = nlarx(z1,[2 2 1],SN); sys.OutputFcn.LinearFcn.Use
ans = logical
0
Загрузите данные оценки.
load throttledata;Детрендируйте данные.
Tr = getTrend(ThrottleData); Tr.OutputOffset = 15; DetrendedData = detrend(ThrottleData,Tr);
Оцените линейную модель ARX.
LinearModel = arx(DetrendedData,[2 1 1]);
Оцените нелинейную модель ARX с помощью линейной модели. Модели порядков, задержек и линейных параметров NonlinearModel получают из LinearModel.
NonlinearModel = nlarx(ThrottleData,LinearModel)
NonlinearModel = Nonlinear ARX model with 1 output and 1 input Inputs: Step Command Outputs: Throttle Valve Position Regressors: Linear regressors in variables Throttle Valve Position, Step Command List of all regressors Output function: Wavelet Network with 7 units Sample time: 0.01 seconds Status: Estimated using NLARX on time domain data "ThrottleData". Fit to estimation data: 99.03% (prediction focus) FPE: 0.1127, MSE: 0.1039
idnlarx ОбъектЗагрузите данные оценки.
load iddata1;Создайте idnlarx модель.
sys = idnlarx([2 2 1]);
Сконфигурируйте модель с помощью записи через точку:
Используйте объект отображения сигмоидной сети.
Присвойте имя.
sys.Nonlinearity = 'sigmoidnet'; sys.Name = 'Model 1';
Оцените нелинейную модель ARX со структурой и свойствами, заданными в idnlarx объект.
sys = nlarx(z1,sys)
sys = Nonlinear ARX model with 1 output and 1 input Inputs: u1 Outputs: y1 Regressors: Linear regressors in variables y1, u1 List of all regressors Output function: Sigmoid Network with 10 units Name: Model 1 Sample time: 0.1 seconds Status: Estimated using NLARX on time domain data "z1". Fit to estimation data: 69.03% (prediction focus) FPE: 2.918, MSE: 1.86
Если оценка останавливается на локальном минимуме, можно возмущать модель, используя init и переоценить модель.
Загрузите данные оценки.
load iddata1;Оцените начальную нелинейную модель.
sys1 = nlarx(z1,[4 2 1],'sigmoidnet');Случайным образом возмущайте параметры модели, чтобы избежать локальных минимумов.
sys2 = init(sys1);
Оцените новую нелинейную модель с возмущенными значениями.
sys2 = nlarx(z1,sys1);
Загрузите данные оценки.
load twotankdata;Создайте iddata объект из данных оценки.
z = iddata(y,u,0.2);
Создайте nlarxOptions набор опций, задающий цель минимизации ошибок симуляции и максимум 50 итераций оценки.
opt = nlarxOptions;
opt.Focus = 'simulation';
opt.SearchOptions.MaxIterations = 50;Оцените нелинейную модель ARX.
sys = nlarx(z,[4 4 1],'sigmoidnet',opt)sys = Nonlinear ARX model with 1 output and 1 input Inputs: u1 Outputs: y1 Regressors: Linear regressors in variables y1, u1 List of all regressors Output function: Sigmoid Network with 10 units Sample time: 0.2 seconds Status: Estimated using NLARX on time domain data "z". Fit to estimation data: 88.79% (simulation focus) FPE: 3.341e-05, MSE: 0.0004307
Загрузите данные примера регуляризации.
load regularizationExampleData.mat nldata;
Создайте sigmoidnet объект отображения с 30 модулями измерения и задавать порядки модели.
MO = sigmoidnet(30); Orders = [1 2 1];
Создайте набор опций оценки и установите метод поиска оценки на lm.
opt = nlarxOptions('SearchMethod','lm');
Оцените нерегулярную модель.
sys = nlarx(nldata,Orders,MO,opt);
Сконфигурируйте Lambda регуляризации параметр.
opt.Regularization.Lambda = 1e-8;
Оцените регуляризованную модель.
sysR = nlarx(nldata,Orders,MO,opt);
Сравните две модели.
compare(nldata,sys,sysR)

Большой отрицательный результат подгонки для нерегулизованной модели указывает на плохую подгонку к данным. Оценка регуляризованной модели дает значительно лучший результат.
Нелинейная модель ARX состоит из регрессоров модели и выходной функции. Выходная функция включает линейные и нелинейные функции, которые действуют на регрессоры модели, чтобы дать выход модели и фиксированное смещение для этого выхода. Этот блок представляет структуру нелинейной модели ARX в сценарии симуляции.
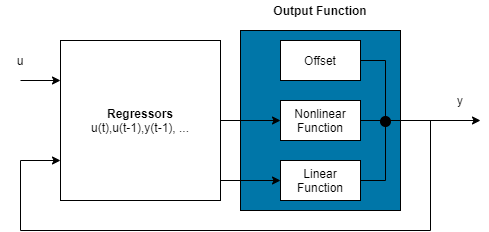
Программа вычисляет выходные y нелинейной модели ARX в два этапа:
Он вычисляет значения регрессора из текущих и прошлых входных значений и прошлых выходных данных.
В самом простом случае регрессоры являются задержанными входами и выходами, такими как u (t -1) и y (t -3). Такие регрессоры называются linear regressors. Линейные регрессоры задаются с помощью linearRegressor объект. Можно также задать линейные регрессоры при помощи заказов линейной модели ARX в качестве входного параметра. Для получения дополнительной информации см. «Нелинейные порядки модели ARX» и «Задержка». Однако этот второй подход ограничивает набор регрессоров линейными регрессорами с последовательными задержками. Чтобы создать polynomial regressors, используйте polynomialRegressor объект. Можно также задать custom regressors, которые являются нелинейными функциями задержанных входов и выходов. Например, u (t -1) y (t -3) является пользовательским регрессором, который умножает образцы входа и выхода вместе. Задайте пользовательские регрессоры, используя customRegressor объект.
Можно назначить любой из регрессоров в качестве входов линейному функциональному блоку выходной функции, нелинейному функциональному блоку или обоим.
Он преобразует регрессоры в выходные данные модели с помощью блока выходной функции. Блок выходной функции может включать линейные и нелинейные блоки параллельно. Для примера рассмотрим следующее уравнение:
Здесь x является вектором регрессоров, а r - средним значением x. - выход блока линейной функции. представляет выход нелинейного функционального блока. Q является проекционной матрицей, которая делает вычисления хорошо обусловленными. d является скалярным смещением, которое добавляется к комбинированным выходам линейного и нелинейного блоков. Точная форма F (x) зависит от вашего выбора выходной функции. Можно выбрать из доступных объектов отображения, таких как сети древовидного раздела, вейвлет и многослойные нейронные сети. Можно также исключить из выходной функции линейный или нелинейный функциональный блок.
При оценке нелинейной модели ARX программное обеспечение вычисляет значения параметров модели, такие как L, r, d, Q и другие параметры, задающие g.
Получившиеся нелинейные модели ARX idnlarx объекты, которые хранят все данные модели, включая регрессоры модели и параметры выходной функции. Для получения дополнительной информации об этих объектах см. Раздел «Нелинейные структуры модели».
aic | fpe | goodnessOfFit | idnlarx | isnlarx | linearRegressor | nlarxOptions | polynomialRegressor
