Нелинейная модель ARX
Система координат idnlarx модель представляет нелинейную модель ARX, которая является расширением линейной структуры ARX и содержит линейные и нелинейные функции.
Нелинейная модель ARX состоит из регрессоров модели и выходной функции. Выходная функция включает линейные и нелинейные функции, которые действуют на регрессоры модели, чтобы дать выход модели и фиксированное смещение для этого выхода. Этот блок представляет структуру нелинейной модели ARX в сценарии симуляции.
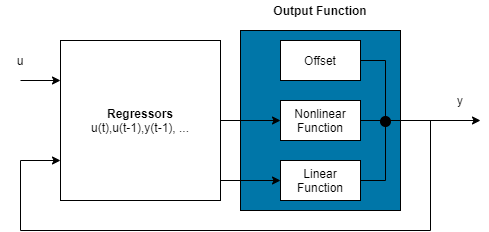
Программа вычисляет выходные y нелинейной модели ARX в два этапа:
Он вычисляет значения регрессора из текущих и прошлых входных значений и прошлых выходных данных.
В самом простом случае регрессоры являются задержанными входами и выходами, такими как u (t -1) и y (t -3). Такие регрессоры называются linear regressors. Линейные регрессоры задаются с помощью linearRegressor объект. Можно также задать линейные регрессоры при помощи линейных порядков моделей ARX в качестве входного параметра. Для получения дополнительной информации см. «Нелинейные порядки модели ARX» и «Задержка». Однако этот второй подход ограничивает набор регрессоров линейными регрессорами с последовательными задержками. Чтобы создать polynomial regressors, используйте polynomialRegressor объект. Можно также задать custom regressors, которые являются нелинейными функциями задержанных входов и выходов. Например, u (t -1) y (t -3) является пользовательским регрессором, который умножает образцы входа и выхода вместе. Задайте пользовательские регрессоры, используя customRegressor объект.
Можно назначить любой из регрессоров в качестве входов линейному функциональному блоку выходной функции, нелинейному функциональному блоку или обоим.
Он преобразует регрессоры в выходные данные модели с помощью блока выходной функции. Блок выходной функции может включать линейные и нелинейные блоки параллельно. Для примера рассмотрим следующее уравнение:
Здесь x является вектором регрессоров, а r - средним значением x. - выход блока линейной функции. представляет выход нелинейного функционального блока. Q является проекционной матрицей, которая делает вычисления хорошо обусловленными. d является скалярным смещением, которое добавляется к комбинированным выходам линейного и нелинейного блоков. Точная форма F (x) зависит от вашего выбора выходной функции. Можно выбрать из доступных объектов отображения, таких как сети древовидного раздела, вейвлет и многослойные нейронные сети. Можно также исключить из выходной функции линейный или нелинейный функциональный блок.
При оценке нелинейной модели ARX программное обеспечение вычисляет значения параметров модели, такие как L, r, d, Q и другие параметры, задающие g.
Получившиеся нелинейные модели ARX idnlarx объекты, которые хранят все данные модели, включая регрессоры модели и параметры выходной функции. Для получения дополнительной информации об этих объектах см. Раздел «Нелинейные структуры модели».
Для получения дополнительной информации о idnlarx структура модели, см. Что такое нелинейные модели ARX?
Для idnlarx свойства объекта, см. Свойства.
Можно получить idnlarx объект одним из двух способов.
sys = idnlarx(output_name,input_name,orders)
sys = idnlarx(output_name,input_name,Regressors)output_name и input_name, соответственно, и набор регрессоров в регрессорах, который содержит любую комбинацию линейных, полиномиальных и пользовательских регрессоров. Программное обеспечение создает sys использование вейвлет по умолчанию ('wavenet') объект отображения для выходной функции.
sys = idnlarx(linmodel)linmodel извлечения некоторых свойств, таких как имена, модули и шаг расчета, и инициализации значений линейных коэффициентов модели. Используйте этот синтаксис, когда вы хотите создать нелинейную модель ARX как расширение или улучшение существующей линейной модели.
sys = idnlarx(___,Name,Value)idnlarx моделировать структуру с помощью одного или нескольких аргументов в виде имя-значение.
Для получения информации о функциях объекта для idnlarx, см. Нелинейные модели ARX.
customRegressor | getreg | idnlarx/findop | linear | linearize | linearRegressor | nlarx | pem | polynomialRegressor | sigmoidnet | wavenet
