Создайте 3-D карту заполнения
The occupancyMap3D класс хранит информацию о карте 3-D и карте. Карта сохранена как вероятностные значения в структуре данных octree. Класс обрабатывает произвольные окружения и динамически расширяет свой размер на основе входов наблюдений. Можно добавить наблюдения в виде облаков точек или в виде конкретных xyz местоположений. Эти наблюдения обновляют значения вероятностей. Вероятностные значения представляют заполненность местоположений. Структура данных octree соответствующим образом обрезает данные, чтобы сохранить эффективность как в памяти, так и на диске.
omap = occupancyMap3D
omap = occupancyMap3D(res)Resolution свойство.
omap = occupancyMap3D(res,Name,Value)Name,Value аргументы в виде пар. Для примера, 'FreeThreshold',0.25 устанавливает порог, чтобы рассматривать камеры без препятствий как значение вероятности 0,25. Заключайте каждое имя свойства в кавычки.
checkOccupancy | Проверяйте, свободны ли местоположения или заняты |
getOccupancy | Получите вероятность заполнения местоположений |
inflate | Карта надувания |
insertPointCloud | Вставьте 3-D точки или наблюдение облака точек в карту |
rayIntersection | Найти точки пересечения лучей и занятых камер карты |
setOccupancy | Установите вероятность заполнения местоположений |
show | Показать карту заполнения |
updateOccupancy | Обновление вероятности заполнения в местоположениях |
The occupancyMap3D объект хранит препятствия в трехмерном пространстве, используя наблюдения датчиков для отображения окружения. Создайте карту и добавьте точки из облака точек, чтобы идентифицировать препятствия. Затем надьте препятствия в карте, чтобы обеспечить безопасное рабочее пространство вокруг препятствий.
Создайте occupancyMap3D объект с разрешением карты 10 ячеек/метр.
map3D = occupancyMap3D(10);
Задайте набор 3-D точек как наблюдение от положения [x y z qw qx qy qz]. Это положение предназначено для датчика, который наблюдает эти точки и расположен по центру от источника. Задайте два набора точек для вставки нескольких наблюдений.
pose = [ 0 0 0 1 0 0 0]; points = repmat((0:0.25:2)', 1, 3); points2 = [(0:0.25:2)' (2:-0.25:0)' (0:0.25:2)']; maxRange = 5;
Вставить первый набор точек можно используя команду insertPointCloud. Функция использует положение датчика и заданные точки, чтобы вставить наблюдения в карту. Отображаемые цвета коррелируют с высотой точки только для иллюстративных целей.
insertPointCloud(map3D,pose,points,maxRange) show(map3D)

Вставьте второй набор точек. Луч между положением датчика (источника) и этими точками перекрывается точками от предыдущей вставки. Поэтому свободное пространство между датчиком и новыми точками обновляется и помечается как свободное пространство.
insertPointCloud(map3D,pose,points2,maxRange) show(map3D)

Надьте карту, чтобы добавить буферную зону для безопасной операции вокруг препятствий. Задайте радиус транспортного средства и безопасное расстояние и используйте сумму этих значений, чтобы задать радиус инфляции для карты.
vehicleRadius = 0.2; safetyRadius = 0.3; inflationRadius = vehicleRadius + safetyRadius; inflate(map3D, inflationRadius); show(map3D)

Структура данных octree является иерархической структурой, используемой для деления окружения на кубические тома, называемые voxels. Для заданного объема карты пространство рекурсивно подразделяется на восемь вокселей, пока не достигается желаемое разрешение карты (размер вокселя). Это подразделение может быть представлено как дерево, в котором хранятся значения вероятностей для местоположений на карте.
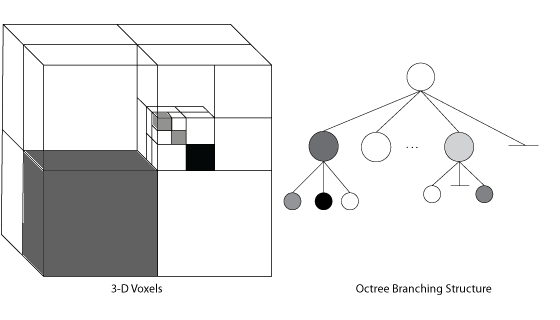
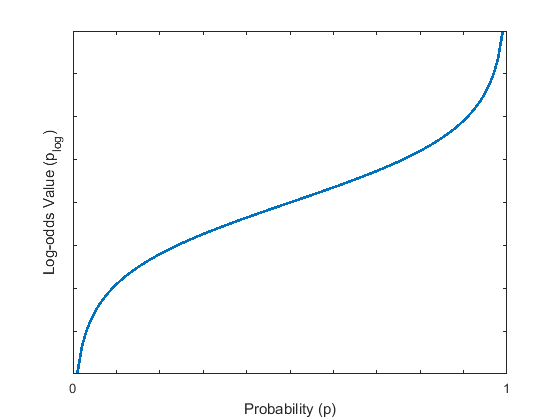
Значения вероятностей в дереве имеют представление логарифмических коэффициентов. Используя это представление, местоположения, легко восстанавливающиеся от динамических наблюдений и численных ошибок из-за малых вероятностей, уменьшаются. Чтобы сохранить эффективность в памяти, более низкие ветви дерева обрезаются в структуре, если они имеют одинаковые значения заполнения, используя это представление логарифмических шансов.
Класс внутренне обрабатывает организацию этой структуры данных, включая обрезку ветвей. Задайте все наблюдения как пространственные координаты при использовании таких функций, как setOccupancy, getOccupancy, или insertPointCloud. Вставки в дерево и навигация через дерево определяются на основе пространственных координат и разрешения карты.
[1] Hornung, Armin, Kai M. Wurm, Maren Bennewitz, Cyrill Stachniss и Wolfram Burgard. OctoMap: эффективная вероятностная среда 3D отображения, основанная на октреях. Автономные роботы, Том 34, № 3, 2013, с. 189-206.. doi: 10.1007/s10514-012-9321-0.
inflate | insertPointCloud | setOccupancy | show | readOccupancyMap3D (ROS Toolbox)