Колесо, обернутое в шнур для передачи крутящего момента и движения
Simscape/Multibody/Ремни и кабели

Блок Pulley выполнен в виде канавчатого или зубчатого колеса, обернутого в шнур, причем устройство, часто используемое при передаче крутящего момента и частичном движении, обеспечивает механическое преимущество, которое оно может обеспечить. Шкив (или звездочка, если зубчатый) идеален: без масс и трения, с нулевым скольжением позволенным между его поверхностью и окружающим шнуром, сам идеализирован как подтягиваемый и нерастягиваемый. Используйте шкив по отдельности или как часть составной системы шкивов, такой как блок и снасть подъемника или синхроимпульс двигателя автомобиля.
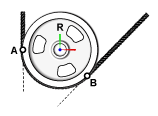
Шкив имеет одну локальную систему координат (порт системы координат R) и две точки касания шнура (ремни A и B). Система координат размещается с источником в центре шкива и осью Z вдоль его оси вращения. Точки касания шнура совпадают с положениями, в которых шнур встречается или отделяется от шкива. Эти местоположения могут измениться во время симуляции. Ремень или кабель оборачивается вокруг шкива от порта A до порта B так, чтобы проследить дугу против часовой стрелки вокруг оси Z.
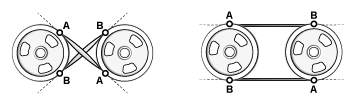
В системе с обратной связью из двух шкивов - таких как ременный привод - соединения портов ремня определяют, пересечена или открыта геометрия шнура. Как показано на следующей схеме, в системе шкивов, в которой оси Z выровнены параллельно, если порт A одного соединяется с портом A другого, то шнур пересекает; если порт A из одного соединяется с портом B другого, то шнур открыт. Эффект тот же, если вместо переключения портов соединения одна из систем координат перевернута так, что оси Z шкивов являются антипараллельными.
Степени свободы шкива полностью зависят от соединений и ограничений (если таковые имеются), с которыми он соединяется. Прикрепление шкива к корпусу посредством шарнирного соединения придает шкиву одну степень свободы вращения относительно корпуса; затем один свободно вращается относительно другого. Фиксация шкива к другому шкиву с помощью прямого соединения, твердого преобразования или сварного соединения ограничивает эти два блока так, что если один вращается, то должен быть и другой.
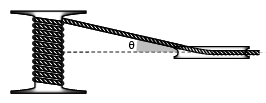
По умолчанию шнур может входить и выходить из шкива под углом к его центральной плоскости (θ на рисунке). Этот угол может варьироваться во время симуляции - например, из-за перемещения шкива на призматическом соединении. Хотя точка контакта всегда находится в центральной плоскости шкива, шкив может перемещаться, когда установлен на шарнире. Шнур также может быть ограничен входом и выходом из шкива в его центральной плоскости. Применение этого ограничения зависит от настроек блока Belt-Cable Properties.
Шкивы должны оставаться на расстояниях, которые сохраняют естественную длину шнура. Эта длина вычисляется из начальных расположений шкивов и фиксируется: шнур не может ни растягиваться, ни ослабевать во время симуляции. Расчеты длины включают длины дуг шнура вокруг шкивов. Контакт между ними идеализирован как скользкий, с точкой контакта на шнуре, всегда движущейся с той же мгновенной скоростью, что и его аналог на шкиве.
Обратите внимание, что порты системы координат и ремня относятся к различным областям мультитела. Как правило, порты соединяются только с аналогичными портами - портами системы координат к другим портам системы координат, портами ремня к другим портам ремня. Область ремня имеет особое требование, чтобы каждая сеть или соединительные линии ремня соединялись с одним (и не более чем с одним) блоком Belt-Cable Properties. Именно через этот блок конфигурируется визуализация шнура и вычисляется ее длина (при обновлении схемы).
Визуализация шнура имеет форму линии тангажа. Шнур встречается и отделяется от шкива касательной к его окружности. Дуга контакта между шнуром и шкивом называется дугой тангажа. Линия тангажа шнура является суммой сегментов линии между различными шкивами и их соответствующими дугами тангажа. Сегменты линии между шкивами показаны как прямолинейные, согласующиеся с ограничением, что никакое ослабление не допускается.
Объедините блок Pulley с блоком Belt-Cable Spool для извлечения из лебедки и возврата к ней дополнительных длин шнура. Примером применения является опускание и подъем крюкового блока башенного крана. Используйте блок Belt-Cable End, чтобы задать конечную точку шнура. Конечная точка содержит систему координат для соединения с нагрузкой, фиксатором или другой частью модели мультитела.
Pitch Radius - Расстояние от центра шкива до осевой линии шнура10 cm (по умолчанию) | положительная скалярная величина в единицах измерения длиныРасстояние от центра шкива до осевой линии шнура в любой точке контакта. В составных системах шкивов различия в радиусах тангажа часто определяют отношение, при котором уменьшается скорость или увеличивается крутящий момент.
Initial Wrap Angle - Минимальный угол переноса шкива в начале симуляции0.0 deg (по умолчанию) | положительная скалярная величина в степеняхLower Bound - задайте нижнюю границу начального угла переноса шкива. Угол переноса в начале симуляции больше или равен этому заданному значению.
Sensing - Выбор кинематических переменных для восприятияUnchecked (по умолчанию) | ПровереноВыбор кинематических переменных для восприятия. Установите флажок, чтобы открыть порт физического сигнала для соответствующей переменной. Переменные, доступные для измерения:
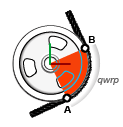
Wrap Angle - угол от точки контакта, связанной с портом A, до угла, связанного с портом B. Этот угол измеряется в центральной (xy) плоскости шкива. Он всегда равен или больше нуля, причем его значение увеличивается на 2π для каждого оборота, сделанного против часовой стрелки вокруг локальной оси z -. Используйте порт qwrp для этого измерения.
Рисунок показывает угол переноса между контактными точками (A и B шкива). Локальная система координат указывает x -ось (горизонтальная) и y -ось (вертикальная) шкива.
Pulley Angle A - Угол, измеренный в плоскости xy опорной системы координат, от локальной оси x до линии между началом системы координат и точкой контакта A .
Если точка контакта выше xz -плоскости (в + y -области опорной системы координат), угол положительный. Если точка контакта находится ниже xz -плоскости, угол отрицательный. Угол равен нулю, когда точка контакта находится точно в xz -плоскости.
Угол не является модульным. Вместо того, чтобы быть ограниченным диапазоном 360 градусов - привязка к началу области значений после завершения поворота - измеренное значение изменяется постоянно с повторными поворотами. Каждый поворот, который делает барабан, складывает (или вычитает) 2, к измерению.
Используйте порт qpa для этого измерения.
Углы шкива A и B
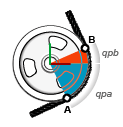
Pulley Angle B - Угол, измеренный в плоскости xy опорной системы координат, от локальной оси x до линии между началом системы координат и точкой контакта B .
Если точка контакта выше xz -плоскости (в + y -области опорной системы координат), угол положительный. Если точка контакта находится ниже xz -плоскости, угол отрицательный. Угол равен нулю, когда точка контакта находится точно в xz -плоскости.
Угол не является модульным. Вместо того, чтобы быть ограниченным диапазоном 360 градусов - привязка к началу области значений после завершения поворота - измеренное значение изменяется постоянно с повторными поворотами. Каждый поворот, который делает барабан, складывает (или вычитает) 2, к измерению.
Используйте порт qpb для этого измерения.
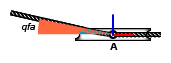
Fleet Angle A - Угол от xy-плоскости опорной системы координат к шнуру в точке контакта A. Плоскость xy совпадает с плоскостью центра барабана.
Если шнур приближается к точке контакта сверху xy-плоскости (в области + z опорной системы координат), угол положительный. Если шнур приближается снизу, угол отрицательный. Угол равен нулю, когда шнур приближается к точке контакта в центральной плоскости барабана.
Угол является модульным, что означает, что его значение связано - здесь, между - Эта область значений открыта. Измеренное значение может измениться между-π/2 и + π/2, но это не может поразить ни один предел.
Обратите внимание, что если параметру Drum Belt-Cable Alignment блока задано значение Belt-Cable Properties Monitored Planarблок шкива должен быть плоским, и поэтому угол вала всегда равен нулю. Чтобы смоделировать неланарную сборку, используйте настройку по умолчанию для этого параметра: Unrestricted.
Используйте порт qfa для этого измерения.
Угол флота A
Fleet Angle B - Угол от xy-плоскости опорной системы координат к шнуру в точке контакта B. Плоскость xy совпадает с плоскостью центра барабана.
Если шнур приближается к точке контакта сверху xy-плоскости (в области + z опорной системы координат), угол положительный. Если шнур приближается снизу, угол отрицательный. Угол равен нулю, когда шнур приближается к точке контакта в центральной плоскости барабана.
Угол является модульным, что означает, что его значение связано - здесь, между - Эта область значений открыта. Измеренное значение может измениться между-π/2 и + π/2, но это не может поразить ни один предел.
Обратите внимание, что если параметру Drum Belt-Cable Alignment блока задано значение Belt-Cable Properties Monitored Planarблок шкива должен быть плоским, и поэтому угол вала всегда равен нулю. Чтобы смоделировать неланарную сборку, используйте настройку по умолчанию для этого параметра: Unrestricted.
Используйте порт qfb для этого измерения.







