Современный подход к характеристике целей эффективности с обратной связью состоит в том, чтобы измерить размер некоторых матриц передаточной функции с обратной связью с использованием различных матричных норм. Матричные нормы обеспечивают меру того, как большие выходные сигналы могут получить для определенных классов входных сигналов. Оптимизация этих типов эффективности задач над набором стабилизирующих контроллеров является основной тягой недавней оптимальной теории управления, такой как L 1, H 2, H∞ и оптимальное управление. Следовательно, важно понять, сколько типов целей управления может быть представлено как минимизация передаточных функций с обратной связью.
Рассмотрим задачу отслеживания с подавлением помех, шумом измерения и ограничениями входного сигнала управления, как показано на Обобщенной и Взвешенном Блоке Эффективности. K является некоторым контроллером, который должен быть разработан, и G является системой, которую вы хотите контролировать.
Типичная цель эффективности в системе с обратной связью

Разумной, хотя и не точной, целью проекта было бы проектирование K, чтобы сохранить отслеживание ошибок и управление входным сигналом маленьким для всех разумных ссылочных команд, шумов датчика и внешних нарушений порядка.
Следовательно, естественной целью эффективности является усиление с обратной связью от экзогенных воздействий (ссылки, шум датчика и нарушений порядка внешних сил) к регулируемым переменным (ошибки отслеживания и входной сигнал управления). В частности, пусть T обозначает отображение с обратной связью от внешних влияний к регулируемым переменным:
Можно оценить эффективность, измерив коэффициент усиления от внешних воздействий до регулируемых переменных. Другими словами, хорошая эффективность связана с тем, что T является маленьким. Поскольку система с обратной связью является мультивходом, мультиутпутевой (MIMO) динамической системой, существует два различных аспекта усиления T:
Пространственный (векторные нарушения порядка и векторные ошибки)
Временная (динамическая связь между входными/выходными сигналами)
Следовательно, критерий эффективности должен учитывать
Относительная величина внешних воздействий
Частотная зависимость сигналов
Относительная важность величин регулируемых переменных
Таким образом, если цель эффективности находится в форме матричной нормы, это должна быть фактически взвешенная норма
∥ ∥ WLTWR
Цели эффективности с обратной связью сформулированы как взвешенные передаточные функции с обратной связью, которые должны быть сделаны маленькими посредством обратной связи. Типовой пример, который включает много релевантных терминов, показан в форме блока в Обобщенной и Взвешенном Блоке Эффективности. В схеме G обозначает модель объекта управления, а K является контроллером обратной связи.
Обобщенная и взвешенный блок эффективности
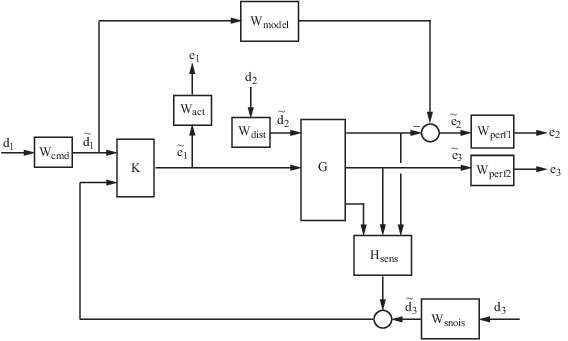
Блоки на этом рисунке могут быть скалярными (SISO) и/или многомерными (MIMO), в зависимости от конкретного примера. Математическая цель H∞ управления состоит в том, чтобы передаточная функция MIMO с обратной связью Ted удовлетворяла ∥ Ted ∥∞ < 1. Функции взвешивания используются для масштабирования входных/выходных передаточных функций таким образом, чтобы при ∥ Ted ∥∞ < 1, зависимости между и подходит.
Эффективность требования к системе с обратной связью преобразуются в H∞ средой с помощью функций взвешивания или масштабирования. Веса выбираются для расчета относительной величины сигналов, их частотной зависимости и их относительной важности. Это показано на рисунке выше, где веса или масштабы [Wcmd, Wdist, Wsnois] используются для преобразования и масштабирования нормализованных входных сигналов [d1, d2, d3] в физические единицы измерения, заданные как [d1, d2, d3]. Точно так же веса или масштабирования [Wact, Wperf1,Wperf2] преобразуют и масштабируют физические единицы измерения в нормализованные выходные сигналы [e1, e2, e3]. Следует интерпретация сигналов, весовых функций и моделей.
|
Сигнал |
Значение |
|---|---|
|
d1
|
Нормированная ссылочная команда Типичная опорная команда в физических единицах измерения |
|
d2
|
Нормализованные экзогенные нарушения порядка Типичные экзогенные нарушения порядка в физических единицах измерения |
|
d3
|
Нормированный шум датчика Типичный шум датчика в физических единицах измерения |
|
e1
|
Взвешенные сигналы управления Фактические сигналы управления в физических единицах измерения |
|
e2
|
Взвешенные ошибки отслеживания Фактические ошибки отслеживания в физических единицах измерения |
|
e3
|
Взвешенные ошибки объекта Фактические ошибки объекта в физических единицах измерения |
Wcmd
Wcmd включен в H∞ задачи управления, которые требуют отслеживания команды ссылки. Wcmd формирует нормированные опорные командные сигналы (величина и частота) в фактические (или типичные) опорные сигналы, которые вы ожидаете получить. Он описывает величину и частотную зависимость опорных команд, сгенерированных нормированным опорным сигналом. Обычно Wcmd плоский на низкой частоте и откатывается на высокой частоте. Для примера в задаче управления рейса пилоты истребителей генерируют команды stick входа ссылки до полосы пропускания около 2 Гц. Предположим, что палка имеет максимальный ход в три дюйма. Команды пилот-сигнала могут быть смоделированы как нормированные сигналы, переданные через фильтр первого порядка:
Wmodel
Wmodel представляет собой желаемую идеальную модель для системы с обратной связью и часто включается в формулировки задачи с требованиями отслеживания. Включение идеальной модели для отслеживания часто называется задачей соответствия модели, то есть цель системы с обратной связью состоит в том, чтобы соответствовать определенной модели. Для хорошего ответа отслеживания команд можно хотеть, чтобы система с обратной связью реагировала как хорошо демпфированная система второго порядка. Идеальной моделью в таком случае будет
для заданной желаемой естественной частоты, и желаемого коэффициента затухания Модули преобразования могут потребоваться, чтобы гарантировать точную корреляцию между идеальной моделью и системой с обратной связью. В примере пилота истребителя предположим, что скорость крена командуется и для каждого дюйма движения палки желательна реакция 10 °/с. Затем в этих модулях соответствующей моделью является:
Wdist
Wdist формирует содержимое частоты и величину экзогенных нарушений порядка, влияющих на объект. Например, рассмотрим электронный микроскоп как объект. Преобладающая цель эффективности состоит в том, чтобы механически изолировать микроскоп от внешних механических нарушений порядка, таких как возбуждения земли, звуковые (давления) волны и воздушные потоки. Можно захватить спектр и относительные величины этих нарушений порядка с помощью матрицы wdist взвешивания передаточной функции.
Wperf1
Wperf1 взвешивает различие между откликом системы с обратной связью и идеальной моделью модели W. Часто вы можете захотеть точного соответствия идеальной модели на низкой частоте и потребовать менее точного соответствия на более высокой частоте, в этом случае Wperf1 плоская на низкой частоте, сходится с первого или второго порядка и уплощается с небольшим, ненулевым значением на высокой частоте. Обратная величина веса связана с допустимым размером ошибок отслеживания, при работе с эталонными командами и нарушениями порядка, описанными Wcmd и Wdist.
Wperf2
Wperf2 наказывает переменные, внутренние для процесса G, такие как состояния привода, которые являются внутренними для G, или другие переменные, которые не являются частью цели слежения.
Wact
Wact используется для формирования штрафа при использовании сигнала управления. Wact - это частотная изменяющаяся функция взвешивания, используемая для штрафования пределов на отклонение/положение, скорость/скорость отклонения и т.д., реакция управляющих сигналов, при решении задач отслеживания и подавлений помех, определенных выше. Каждый сигнал управления обычно штрафуется независимо.
Wsnois
Wsnois представляет модели сенсорного шума в частотном диапазоне. Каждая обратная связь измерения датчика к контроллеру имеет некоторый шум, который часто выше в одной частотной области значений, чем другой. Вес Wsnois пытается захватить эту информацию, полученную из лабораторных экспериментов или основанную на измерениях производителя, в задаче управления. Для примера акселерометры среднего класса имеют значительный шум на низкой частоте и высокой частоте. Поэтому соответствующий вес Wsnois будет больше на низкой и высокой частоте и иметь меньшую величину в среднем области значений. Перемещение или измерение вращения часто довольно точно на низкой частоте и в установившемся состоянии, но плохо реагирует, когда частота увеличивается. Функция взвешивания для этого датчика была бы маленькой на низкой частоте, постепенно увеличивалась величина как система первого или второго порядка и выравнивалась бы на высокой частоте.
Hsens
Hsens представляет модель динамики датчика или внешний антиалиазирующий фильтр. Передаточные функции, используемые для описания Hsens, основаны на физических характеристиках отдельных компонентов. Эти модели также могут быть скопированы в модель объекта управления G.
Этот типовой блок имеет огромную гибкость, и многие цели эффективности могут быть сформулированы в H∞ среде, используя это описание блока.
Эффективность и робастности в системе управления обсуждались в контексте формирования многомерного цикла в Компромиссе между эффективностью и робастностью. В среде системы управления H∞ можно включить цели робастности в качестве дополнительного нарушения порядка передаточных функций ошибки - нарушения порядка, которые будут сохраняться маленькими. Рассмотрите следующий рисунок системы обратной связи с обратной связью с совокупными и мультипликативными моделями неопределенности.
Матрицы передаточных функций заданы как:
где TI (s) обозначает вход дополнительную функцию чувствительности, а SO (s) обозначает выход функцию чувствительности. Ограничения, накладываемые на размер матриц передаточной функции от z1 до w1 и от z2 до w2, гарантируют, что замкнутая система является устойчивой к мультипликативной неопределенности, Β M (s), на входе объекта, и аддитивной неопределенности, Β A (s), вокруг объекта G (s). В формулировке задачи управления H∞ цели робастности входят в процедуру синтеза как дополнительные входные/выходные сигналы, которые должны быть сохранены маленькими. Взаимосвязь с блоками неопределенности удалена.

Цель робастности управления H∞ теперь в том же формате, что и цели эффективности, то есть минимизировать H∞ норму матрицы переноса от z, [z1, z2], до w, [w1, w2].
Матрицы взвешивания или масштабирования часто вводятся, чтобы сформировать частоту и величины содержимого чувствительности и комплементарной чувствительности передаточной функции матрицах. Пусть WM соответствует мультипликативной неопределенности, а WA - аддитивной модели неопределенности. Β M (s) и Β A (s) приняты как норма, ограниченная 1, т.е. |Δ<reservedrangesplaceholder0> (s) |<1 и |ΔA (s) |<1. Следовательно, как функция частоты, |WM (j,) | и |WA (j,) | являются соответствующими размерами самой большой ожидаемой добавки и мультипликативных возмущений объекта.
Мультипликативное взвешивание или масштабирование WM представляет процентную ошибку в модели и часто мало по величине на низкой частоте, между 0,05 и 0,20 (от 5% до 20% ошибки моделирования) и увеличивается больше по величине на высокой частоте, от 2 до 5 ((от 200% до 500% ошибки моделирования). Вес перейдет путем пересечения значения величины 1, что соответствует 100% неопределенности в модели, с частотой, по крайней мере, в два раза превышающей полосу пропускания системы с обратной связью. Типичный мультипликативный вес
Напротив, вес добавки или масштабирование WA представляет абсолютную ошибку, которая часто является маленькой на низкой частоте и большой по величине на высокой частоте. Величина этого веса зависит непосредственно от величины модели объекта управления, G (s).
Не выбирайте функции взвешивания с полюсами, очень близкими к s = 0 (z = 1 для систем дискретного времени). Для образца, хотя может показаться разумным выбрать Wcmd = 1/ s, чтобы применить нуль установившуюся ошибку, это вводит нестабильный полюс, который не может быть стабилизирован, вызывая неудачу синтеза. Вместо этого выберите Wcmd = 1/( s + δ). Значение δ должно быть маленьким, но не очень маленьким по сравнению с динамикой системы. Например, для наилучших числовых результатов, если ваша целевая частота среза составляет около 1 рад/с, выберите δ = 0,0001 или 0,001. Точно так же, за дискретное время, выберите шаги расчета, такие что система и динамика взвешивания не более чем на десять или две десятилетия ниже частоты Найквиста.
hinfstruct | hinfsyn | mixsyn
