Используйте umargin управляйте проектируемым блоком, чтобы смоделировать изменения коэффициента усиления и фазы в циклах обратной связи. Моделирование изменений усиления и фазы в вашей неопределенной системной модели позволяет вам проверить запасы устойчивости во время анализа робастности или применить их во время устойчивого проектирования контроллера.
Чтобы добавить неопределенность усиления и фазы в цикл обратной связи, вы включаете umargin блокируется в неопределенное пространство состояний (uss) модель системы с обратной связью. umargin - блок системы управления SISO, представляющий изменение усиления и фазы в одном местоположении в одном цикле обратной связи. Чтобы смоделировать неопределенность усиления и фазы в системах обратной связи MIMO, вставьте отдельную umargin объект в каждом месте в системе, в котором вы хотите ввести неопределенность усиления и фазы.
umargin моделирует изменения коэффициента усиления и фазы в отдельном канале обратной связи как частотно-зависимый множительный коэффициент F (s), умножающий номинальную L отклика без разомкнутого контура (s), так что возмущенная характеристика является L (s) F (s). Коэффициент F (s) параметризован:
В этой модели,
δ (s) является динамической неопределенностью с ограничением по усилению, нормированной так, что она всегда изменяется внутри единичного диска (||<reservedrangesplaceholder0>||∞ < 1).
ɑ устанавливает величину усиления и изменения фазы, смоделированные F. Для фиксированных σ параметр ɑ управляет размером диска. Для ɑ = 0 мультипликативный коэффициент равен 1, соответствующий номинальной L.
σ, называемое skew, смещает смоделированную неопределенность в сторону увеличения или уменьшения усиления.
Коэффициент F принимает значения в диске с центром на действительной оси и содержащем номинальное значение F = 1. Диск характеризуется своей точкой пересечения DGM = [gmin,gmax] с действительной осью. gmin < 1 и gmin > 1 - минимальные и максимальные относительные изменения в усилении, моделируемые F, в номинальной фазе. Фаза неопределенность, смоделированная F, является областью значений DPM = [pmin,pmax] значений фазы при номинальном усилении (|<reservedrangesplaceholder1>| = 1). Например, на следующем графике правая сторона показывает дисковое F, которое пересекает действительную ось в интервале [0.71.1.4]. Левая сторона показывает, что этот диск моделирует изменение усиления ± 3 дБ и изменение фазы ± 19 °.
F = umargin('F',1.4125)
plot(F)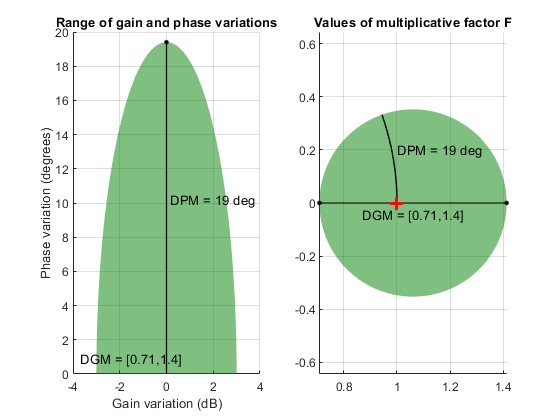
Когда вы создаете umargin блок, вы задаете величину неопределенности путем определения DGM. Использовать getDGM чтобы переместить определенные величины изменений усиления и фазы в подходящую DGM область значений, который захватывает эти изменения. Для получения дополнительной информации о модели неопределенности, используемой umargin, см. Анализ устойчивости с использованием полей диска.
Можно визуализировать области значений неопределенности усиления и фазы, представленные umargin использование объекта plot
(umargin).
Для примеров создания umargin объекты и включение их в неопределенные модели, см.:
Когда у вас есть uss модель, содержащая umargin Система управления блоков можно выполнить анализ робастности и наихудшего случая, чтобы изучить, как изменение усиления и фазы влияет на реакцию системы. Для образца используйте robstab и robgain анализ устойчивой устойчивости и устойчивой эффективности системы с неопределенностью усиления и фазы. Использовать wcgain и wcsigmaplot изучить наихудшие отклики системы. Для некоторых примеров смотрите:
Требование устойчивой устойчивости для системы с обратной связью с umargin неопределенность усиления и фазы эквивалентна применению дискового запаса по амплитуде [gmin,gmax] и соответствующий запас по фазе. Поэтому можно использовать umargin блоки для обеспечения соответствующих полей диска при разработке устойчивых контроллеров с musyn. Для примеров смотрите:
Требование, чтобы система с обратной связью была устойчива к определенной величине усиления и неопределенности фазы, эквивалентно утверждению, что система имеет такое количество запаса по амплитуде и фазе. Поэтому можно использовать umargin блок для проверки дисковых запасов устойчивости системы, которая также требует робастности по отношению к другим типам неопределенности. Для примера смотрите:
Проверяйте робастность, чтобы получить изменения коэффициента усиления и фазы на umargin страница с описанием
getDGM | plot
(umargin) | umargin
