Линейно-квадратично-гауссова (LQG) конструкция
reg = lqg(sys,QXU,QWV)
reg = lqg(sys,QXU,QWV,QI)
reg = lqg(sys,QXU,QWV,QI,'1dof')
reg = lqg(sys,QXU,QWV,QI,'2dof')
reg = lqg(___,'current')
[reg,info] = lqg(___)
reg = lqg(sys,QXU,QWV) вычисляет оптимальный линейно-квадратично-гауссовый (LQG) регулятор reg задана модель состояния-пространства sys завода и матриц взвешивания QXU и QWV. Динамический регулятор reg использует измерения y для генерации управляющего сигнала u, который регулирует y вокруг нулевого значения. Используйте положительную обратную связь для подключения регулятора к выходу установки y.
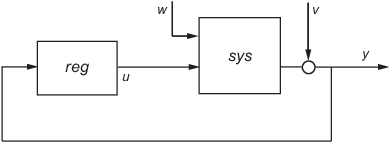
Регулятор LQG минимизирует функцию затрат
с учетом уравнений растений
Cx + Du + v
где технологический шум w и измерительный шум v - гауссовы белые шумы с ковариацией:
QWV
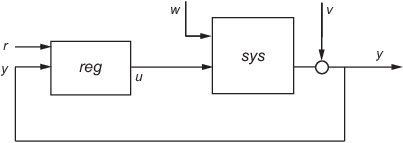
reg = lqg(sys,QXU,QWV,QI) использует команду r уставки и измерения y для генерации управляющего сигнала u. reg имеет интегральное действие, чтобы гарантировать, что y отслеживает команду r.
Сервоконтроллер LQG сводит к минимуму функцию затрат
xiTQixi) dt}
где xi - интеграл ошибки отслеживания r-y. Для систем MIMO r, y и xi должны иметь одинаковую длину.
reg = lqg(sys,QXU,QWV,QI,'1dof') вычисляет сервоконтроллер с одной степенью свободы, который принимает e = r-y, а не [r; y] в качестве входных данных.
reg = lqg(sys,QXU,QWV,QI,'2dof') эквивалентно LQG(sys,QXU,QWV,QI) и создает сервоконтроллер с двумя степенями свободы, показанный ранее.
reg = lqg(___,'current') использует «текущий» оценщик Калмана, который использует x [n 'n] в качестве оценки состояния при вычислении регулятора LQG для дискретно-временной системы.
[reg,info] = lqg(___) возвращает матрицы усиления контроллера и оценщика в структуре info для любого из предыдущих синтаксисов. Можно использовать выигрыши контроллера и оценщика, например, для реализации контроллера в форме наблюдателя. Дополнительные сведения см. в разделе Алгоритмы.
Линейно-квадратично-гауссовый (LQG) регулятор и серворегулятор
В этом примере показано, как сконструировать линейно-квадратично-гауссовый (LQG) регулятор, серворегулятор LQG с одной степенью свободы и серворегулятор LQG с двумя степенями свободы для следующей системы.
Установка имеет три состояния (x), два управляющих входа (u), три случайных входа (w), один выход (y), шум измерения для выхода (v) и следующие уравнения состояния и измерения.
Cx + Du + v
где
0,53 − 0,61]
Система имеет следующие данные ковариации шума:
(vvT) = 0,7
Для регулятора используйте следующую функцию затрат, чтобы определить компромисс между эффективностью регулирования и усилиями по контролю:
1002] u) dt
Для сервоконтроллеров используйте следующую функцию затрат, чтобы определить компромисс между производительностью трекера и усилиями по управлению:
1002] u) dt
Для проектирования контроллеров LQG для этой системы:
Создайте систему state-space, введя в окне MATLAB Command Window следующее:
A = [0 1 0;0 0 1;1 0 0]; B = [0.3 1;0 1;-0.3 0.9]; C = [1.9 1.3 1]; D = [0.53 -0.61]; sys = ss(A,B,C,D);
Определите ковариационные данные шума и матрицы взвешивания, введя следующие команды:
nx = 3; %Number of states ny = 1; %Number of outputs Qn = [4 2 0; 2 1 0; 0 0 1]; Rn = 0.7; R = [1 0;0 2] QXU = blkdiag(0.1*eye(nx),R); QWV = blkdiag(Qn,Rn); QI = eye(ny);
Сформируйте регулятор LQG, набрав следующую команду:
KLQG = lqg(sys,QXU,QWV)
A =
x1_e x2_e x3_e
x1_e -6.212 -3.814 -4.136
x2_e -4.038 -3.196 -1.791
x3_e -1.418 -1.973 -1.766
B =
y1
x1_e 2.365
x2_e 1.432
x3_e 0.7684
C =
x1_e x2_e x3_e
u1 -0.02904 0.0008272 0.0303
u2 -0.7147 -0.7115 -0.7132
D =
y1
u1 0
u2 0
Input groups:
Name Channels
Measurement 1
Output groups:
Name Channels
Controls 1,2
Continuous-time model.Сформируйте сервоконтроллер LQG с одной степенью свободы, введя следующую команду:
KLQG1 = lqg(sys,QXU,QWV,QI,'1dof')A =
x1_e x2_e x3_e xi1
x1_e -7.626 -5.068 -4.891 0.9018
x2_e -5.108 -4.146 -2.362 0.6762
x3_e -2.121 -2.604 -2.141 0.4088
xi1 0 0 0 0
B =
e1
x1_e -2.365
x2_e -1.432
x3_e -0.7684
xi1 1
C =
x1_e x2_e x3_e xi1
u1 -0.5388 -0.4173 -0.2481 0.5578
u2 -1.492 -1.388 -1.131 0.5869
D =
e1
u1 0
u2 0
Input groups:
Name Channels
Error 1
Output groups:
Name Channels
Controls 1,2
Continuous-time model.Сформируйте сервоконтроллер LQG с двумя степенями свободы, введя следующую команду:
KLQG2 = lqg(sys,QXU,QWV,QI,'2dof')A =
x1_e x2_e x3_e xi1
x1_e -7.626 -5.068 -4.891 0.9018
x2_e -5.108 -4.146 -2.362 0.6762
x3_e -2.121 -2.604 -2.141 0.4088
xi1 0 0 0 0
B =
r1 y1
x1_e 0 2.365
x2_e 0 1.432
x3_e 0 0.7684
xi1 1 -1
C =
x1_e x2_e x3_e xi1
u1 -0.5388 -0.4173 -0.2481 0.5578
u2 -1.492 -1.388 -1.131 0.5869
D =
r1 y1
u1 0 0
u2 0 0
Input groups:
Name Channels
Setpoint 1
Measurement 2
Output groups:
Name Channels
Controls 1,2
Continuous-time model.lqg может использоваться как для установок непрерывного, так и дискретного времени. В дискретное время, lqg по умолчанию использует x [n 'n-1] в качестве оценки состояния. Чтобы использовать x [n 'n] в качестве оценки состояния и вычислить оптимальный контроллер LQG, используйте 'current' входной аргумент. Подробнее об оценщиках состояния см. kalman.
Для вычисления регулятора LQG lqg использует команды lqr и kalman. Чтобы вычислить сервоконтроллер, lqg использует команды lqi и kalman.
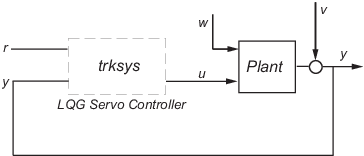
Если требуется больше гибкости при проектировании регуляторов, можно использовать lqr, kalman, и lqgreg команды. Если требуется больше гибкости при конструировании сервоконтроллеров, можно использовать lqi, kalman, и lqgtrack команды. Дополнительные сведения об использовании этих команд и о том, как их использовать, см. в разделе Линейная-квадратично-гауссова (LQG) Конструкция регулирования и линейно-квадратично-гауссова (LQG) Конструкция сервоконтроллера с интегральным действием.
Уравнения контроллера:
Для непрерывного времени:
u = − Kxxe − Kixi
Для дискретного времени:
− Cx [n' n − 1] − Du [n])
Задержанный оценщик:
− Кикси [n]
Текущий оценщик:
] − (KxMx + KwMw) yinn [n]
1] − Du [n]
Здесь,
A, B, C и D - матрицы состояния-пространства регулятора LQG, reg.
xi является интегралом ошибки отслеживания r-y.
Kx, Kw, Ki, L, Mx и Mw являются матрицами усиления контроллера и оценщика, возвращенными в info.
