Решите задачу кратчайшего пути в графике
[___] = graphshortestpath(___, задает дополнительные опции, используя один или несколько аргументы пары "имя-значение". Задайте аргументы пары "имя-значение" после любой комбинации входных аргументов в предыдущих синтаксисах.Name,Value)
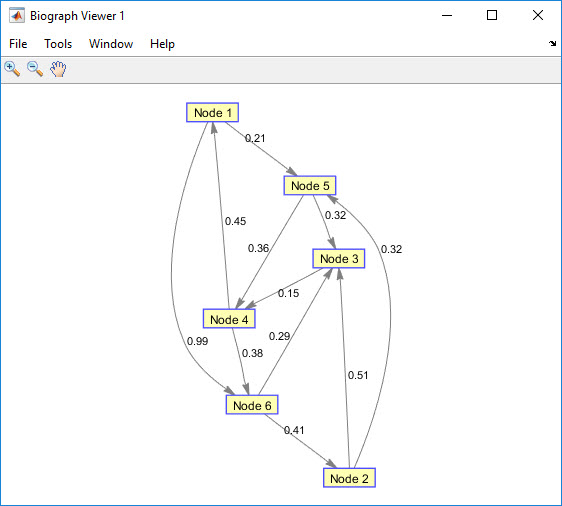
Создайте ориентированный граф с 6 узлами и 11 ребрами.
W = [.41 .99 .51 .32 .15 .45 .38 .32 .36 .29 .21]; DG = sparse([6 1 2 2 3 4 4 5 5 6 1],[2 6 3 5 4 1 6 3 4 3 5],W)
DG = (4,1) 0.4500 (6,2) 0.4100 (2,3) 0.5100 (5,3) 0.3200 (6,3) 0.2900 (3,4) 0.1500 (5,4) 0.3600 (1,5) 0.2100 (2,5) 0.3200 (1,6) 0.9900 (4,6) 0.3800
Отобразите график.
h = view(biograph(DG,[],'ShowWeights','on'))

Biograph object with 6 nodes and 11 edges.
Найдите кратчайший путь от узла 1 до узла 6.
[dist,path,pred] = graphshortestpath(DG,1,6)
dist = 0.9500
path = 1×4
1 5 4 6
pred = 1×6
0 6 5 5 1 4
Отметьте узлы и ребра кратчайшего пути, раскрасив их красным цветом и увеличив ширину линии.
set(h.Nodes(path),'Color',[1 0.4 0.4]) edges = getedgesbynodeid(h,get(h.Nodes(path),'ID')); set(edges,'LineColor',[1 0 0]) set(edges,'LineWidth',1.5)

pred содержит предшествующие узлы кратчайших путей от узла 1, исходного узла, ко всем остальным узлам, а не только к указанному узлу назначения. Можно использовать pred чтобы запросить кратчайшие пути от исходного узла к любому другому узлу в графике.
Например, чтобы вычислить самый короткий путь от узла 1 до узла 4 с помощью информации в pred, запрос pred с узлом назначения в качестве первого запроса. Затем используйте возвращенный ответ, чтобы получить следующий узел. Повторите эту процедуру до тех пор, пока ответ на запрос не будет равен 0, что указывает на исходный узел.
next = pred(4)
next = 5
next = pred(next)
next = 1
next = pred(next)
next = 0
Результаты показывают, что самый короткий путь от узла 1 к узлу 4 является 1- > 5- > 4.
Создайте неориентированный граф с 6 узлами и 11 ребрами.
W = [.41 .99 .51 .32 .15 .45 .38 .32 .36 .29 .21];
DG = sparse([6 1 2 2 3 4 4 5 5 6 1],[2 6 3 5 4 1 6 3 4 3 5],W);
% tril returns the lower triangular part of the matrix.
UG = tril(DG+DG')UG = (4,1) 0.4500 (5,1) 0.2100 (6,1) 0.9900 (3,2) 0.5100 (5,2) 0.3200 (6,2) 0.4100 (4,3) 0.1500 (5,3) 0.3200 (6,3) 0.2900 (5,4) 0.3600 (6,4) 0.3800
Просмотр графика.
h = view(biograph(UG,[],'ShowArrows','off','ShowWeights','on'))

Biograph object with 6 nodes and 11 edges.
Найдите кратчайший путь от узла 1 до узла 6. Задайте 'Directed' на false чтобы указать, что график не является ориентированным графом.
[dist,path,pred] = graphshortestpath(UG,1,6,'Directed',false)dist = 0.8200
path = 1×4
1 5 3 6
pred = 1×6
0 5 5 1 1 3
Отметьте узлы и ребра кратчайшего пути, раскрасив их красным цветом и увеличив ширину линии.
set(h.Nodes(path),'Color',[1 0.4 0.4]) fowEdges = getedgesbynodeid(h,get(h.Nodes(path),'ID')); revEdges = getedgesbynodeid(h,get(h.Nodes(fliplr(path)),'ID')); edges = [fowEdges;revEdges]; set(edges,'LineColor',[1 0 0]) set(edges,'LineWidth',1.5)

dist - Расстояния от исходного узла до всех других узлов в графикеРасстояния от исходного узла до всех других узлов графика, возвращенные в виде числа или вектора. dist возвращается как скаляр, если в качестве третьего входного параметра задан узел назначения.
Функция возвращается Inf для недоступных узлов и 0 для исходного узла.
path - Кратчайшие пути от исходного узла ко всем остальным узламСамые короткие пути от исходного узла ко всем другим узлам, возвращенные как вектор или массив ячеек. Он возвращается как вектор, если вы задаете узел назначения. Каждое число представляет индекс узла в графике.
pred - Предшествующие узлы кратчайших путейПредшествующие узлы кратчайших путей, возвращенные как вектор.
Можно использовать pred для определения кратчайших путей от исходного узла ко всем остальным узлам. Предположим, что у вас есть ориентированный граф с 6 узлами.
Функция находит, что самый короткий путь от узла 1 до узла 6 path = [1 5 4 6] и pred = [0 6 5 5 1 4]. Теперь можно определить самые короткие пути от узла 1 до любого другого узла в графике путем индексации в pred. Для примера, чтобы вычислить самый короткий путь от узла 1 до узла 2, можно запросить pred с узлом назначения в качестве первого запроса, затем используйте возвращенный ответ, чтобы получить следующий узел. Повторите эту процедуру до тех пор, пока ответ на запрос не будет равен 0, что указывает на исходный узел.
pred(2) = 6; pred(6) = 4; pred(4) = 5; pred(5) = 1; pred(1) = 0;
1->5->4->6->2.
[1] Dijkstra, E. W. «A Note on Two Problement in Connexion with Graphs». Numerische Mathematik. Том 1, № 1, 1959, стр. 269-271.
[2] Bellman, R. «О задаче маршрутизации». Ежеквартально по прикладной математике. Том 16, номер 1, стр. 87-90.
[3] Siek, J. G., L. Q. Lee, and A. Lumsdaine. Boost Графика Library: Руководство пользователя и Ссылки Руководство. Upper Saddle River, NJ: Pearson Education, 2002.
graphallshortestpaths | graphconncomp | graphisdag | graphisomorphism | graphisspantree | graphmaxflow | graphminspantree | graphpred2path | graphtopoorder | graphtraverse | shortestpath
