Cоединение обратной связи многих моделей
sys = feedback(sys1,sys2)sys для отрицательного соединения объектов модели с обратной связью sys1,sys2.
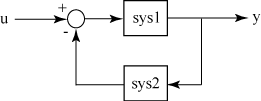
Из рисунка, модель с обратной связью sys имеет u как входной вектор и y как выходной вектор. Обе модели, sys1 и sys2, должны быть непрерывными или дискретными с одинаковыми шагами расчета.
sys = feedback(sys1,sys2,'name')sys с обратными соединениями, заданными соответствующими именами ввода-вывода моделей MIMO sys1 и sys2. Используйте 'name' флаг отмечается только в том случае, если все необходимые операции ввода-вывода в наборе систем MIMO указаны правильно.
sys = feedback(___,sign)sys для цикла обратной связи с типом обратной связи, заданным sign. По умолчанию feedback принимает отрицательную обратную связь и эквивалентно feedback(sys1,sys2,-1). Чтобы вычислить систему с обратной связью с положительной обратной связью, используйте sign = +1.
pendulumModelAndController.mat содержит модель передаточной функции инвертированного маятника SISO G и связанный с ним ПИД-регулятор C.

Загрузите инвертированный маятник и модели контроллеров в рабочую область.
load('pendulumModelAndController','G','C'); size(G)
Transfer function with 1 outputs and 1 inputs.
size(C)
PID controller with 1 output and 1 input.
Использование feedback для создания цикла отрицательной обратной связи с G и C.
sys = feedback(G*C,1)
sys =
1.307e-06 s^3 + 3.136e-05 s^2 + 5.227e-06 s
---------------------------------------------------------
2.3e-06 s^4 + 1.725e-06 s^3 - 4.035e-05 s^2 - 5.018e-06 s
Continuous-time transfer function.
sys - результирующая передаточная функция замкнутого цикла в непрерывном времени, полученная с использованием отрицательной обратной связи. feedback преобразует модель ПИД-регулятора C в передаточную функцию перед соединением ее с моделью передаточной функции в непрерывном времени G. Для получения дополнительной информации смотрите Правила, определяющие тип модели.
В данном примере рассмотрите две передаточные функции, которые описывают объект G и C контроллера соответственно.

Создайте передаточные функции объекта управления и контроллера.
G = tf([2 5 1],[1 2 3],'inputname',"torque",'outputname',"velocity"); C = tf([5,10],[1,10]);
Использование feedback создать цикл отрицательной обратной связи с помощью G и C.
sys = feedback(G,C,-1)
sys = From input "torque" to output "velocity": 2 s^3 + 25 s^2 + 51 s + 10 --------------------------- 11 s^3 + 57 s^2 + 78 s + 40 Continuous-time transfer function.
sys - результирующая передаточная функция замкнутого цикла, полученная с использованием отрицательной обратной связи с крутящим моментом в качестве входа и скорости в качестве выхода.
В данном примере рассмотрите две передаточные функции, которые описывают объект G и C контроллера соответственно.

Создайте передаточные функции объекта управления и контроллера.
G = tf([2 5 1],[1 2 3],'inputname',"torque",'outputname',"velocity"); C = tf([5,10],[1,10]);
Использование feedback для создания положительного цикла обратной связи с помощью G и C.
sys = feedback(G,C,+1)
sys = From input "torque" to output "velocity": -2 s^3 - 25 s^2 - 51 s - 10 --------------------------- 9 s^3 + 33 s^2 + 32 s - 20 Continuous-time transfer function.
sys - результирующая передаточная функция замкнутого цикла, полученная с использованием положительной обратной связи с крутящим моментом в качестве входа и скорости в качестве выхода.
Основываясь на рисунке ниже, рассмотрите соединение двух передаточных функций MIMO с двумя входами и двумя выходами в цикле отрицательной обратной связи.

В данном примере создайте две модели случайного непрерывного пространства состояний с использованием rss.
G = rss(4,2,2); C = rss(2,2,2); size(G)
State-space model with 2 outputs, 2 inputs, and 4 states.
size(C)
State-space model with 2 outputs, 2 inputs, and 2 states.
Использование feedback для соединения двух моделей пространства состояний в цикле отрицательной обратной связи согласно вышеописанному рисунку.
sys = feedback(G,C,-1); size(sys)
State-space model with 2 outputs, 2 inputs, and 6 states.
Получившаяся модель пространства состояний sys является 2 входной, 2 выходной моделью с 6 состояниями. Цикл отрицательной обратной связи завершен так, что,
Первый выход G соединяется с первым входом C
Второй выход G соединяется со вторым входом C
mimoPlantAndController.mat содержит 2 входы, 2 выходы передаточную функцию модели объекта управления G и 2 входы, 2 выходы передаточной функции модели контроллеров C для соединения следующим образом:

Сначала загрузите объект и модели контроллеров в рабочую область.
load('mimoPlantAndController.mat','G','C'); size(G)
Transfer function with 2 outputs and 2 inputs.
size(C)
Transfer function with 2 outputs and 2 inputs.
По умолчанию feedback подключит первый выход G на первый вход C и второй выход G ко второму входу C. В порядок подключения объекта управления и контроллера в соответствии с рисунком назовите соответствующие операции ввода/вывода двух систем для обеспечения правильности соединений.
G.InputName
ans = 2x1 cell
{'torque'}
{'angle' }
G.OutputName
ans = 2x1 cell
{'velocity'}
{'force' }
C.InputName
ans = 2x1 cell
{'force' }
{'velocity'}
C.OutputName
ans = 2x1 cell
{'angle' }
{'torque'}
Затем используйте 'name' флаг со feedback Команда для соединения в соответствии с именами ввода-вывода.
sys = feedback(G,C,'name');Результат передаточной функции отрицательной обратной связи цикла sys имеет соединения обратной связи в необходимом порядке.
Рассмотрим космический объект G с пятью входами и четырьмя выходами и контроллером обратной связи пространства состояний K с тремя входами и двумя выходами. Выходные выходы 1, 3 и 4 объекта G должен быть подключен контроллер K входы и контроллер выходы на входы 2 и 4 объекта управления.

В данном примере сгенерируйте рандомизированные модели пространства состояний в непрерывном времени с использованием rss для обоих G и K.
G = rss(3,4,5); K = rss(3,2,3);
Определите feedout и feedin векторы, основанные на входах и выходах, которые будут соединены в цикле обратной связи.
feedin = [2 4]; feedout = [1 3 4]; sys = feedback(G,K,feedin,feedout,-1); size(sys)
State-space model with 4 outputs, 5 inputs, and 6 states.
sys - результирующая модель пространства состояний замкнутого цикла, полученная путем соединения заданных входов и выходов G и K.
sys1,sys2 - Системы для подключения в цикле обратной связиСистемы для соединения в циклы обратной связи, заданные как динамическая система модели. Динамические системы, которые можно использовать, включают:
Непрерывные или дискретные числовые модели LTI, такие как tf, zpk, pid, pidstd, или ss модели.
Обобщенные или неопределенные модели LTI, такие как genss или uss (Robust Control Toolbox) модели. (Использование неопределенных моделей требует программного обеспечения Robust Control Toolbox™.)
Получившийся цикл обратной связи принимает
текущие значения настраиваемых компонентов для настраиваемых блоков проекта системы управления.
номинальные значения модели для неопределенных блоков проекта системы управления.
Для получения дополнительной информации см. Динамическую систему моделей.
Когда sys1 и sys2 являются двумя различными типами моделей, feedback использует правила приоритета, чтобы определить полученную модель sys. Для примера, когда модель пространства состояний и передаточная функция соединены в цикле обратной связи, полученная система является моделью пространства состояний, основанной на правилах приоритета. Для получения дополнительной информации смотрите Правила, определяющие тип модели.
feedin - Подмножество входов, которые будут использоватьсяПодмножество входов, которые будут использоваться, задается как вектор.
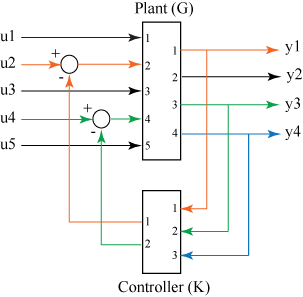
Из рисунка, feedin содержит индексы входного вектора объекта MIMO P и определяет, какой подмножество входов u участвуют в цикле обратной связи. Получившаяся модель sys имеет те же входы, что и G, с сохранением их порядков.
Для получения примера смотрите Задать Вход и Выход Соединения в цикле обратной связи.
feedout - Подмножество выходов, которые будут использоватьсяПодмножество выходов, которые будут использоваться, задается как вектор.
feedout определяет выходные выходы объекта MIMO G используются для обратной связи. Получившаяся модель sys имеет те же выходы, что и G, с сохранением их порядков.
Для получения примера смотрите Задать Вход и Выход Соединения в цикле обратной связи.
sign - Тип обратной связи-1 (по умолчанию) | +1Тип обратной связи, заданный как -1 для отрицательной обратной связи или +1 для положительной обратной связи. feedback принимает отрицательную обратную связь по умолчанию.
Связь с обратной связью должна быть свободной от алгебраических циклов. Для образца, если D1 и D2 являются исходными матрицами sys1 и sys2, это условие эквивалентно:
I + D1D2 несингулярный при использовании отрицательной обратной связи
I − D1D2 несингулярный при использовании положительной обратной связи
