Настраиваемые Обобщенные модели LTI представляют системы, имеющие как фиксированные, так и настраиваемые (или параметрические) коэффициенты.
Можно использовать настраиваемые Обобщенные модели LTI для:
Моделируйте настраиваемый (или параметрический) компонент системы управления, такой как настраиваемый lowpass.
Моделируйте систему управления, которая содержит оба:
Фиксированные компоненты, такие как динамика объекта управления и динамика датчиков
Настраиваемые компоненты, такие как фильтры и компенсаторы
Можно использовать настраиваемые Обобщенные модели LTI для исследований параметров. Для получения примера смотрите Изменение параметра исследования путем дискретизации настраиваемых Моделей. Можно также использовать настраиваемые Обобщенные модели LTI для настройки фиксированных структур управления с помощью команд настройки, таких как systune или приложение Control System Tuner. См. Multiloop, Multiobjective Tuning.
Система Toolbox™ управления включает настраиваемые компоненты с предопределенной структурой, называемой Системой управления Блоков. Можно использовать настраиваемые Блоки Системы управления, чтобы смоделировать любой настраиваемый компонент, который подходит для одной из предопределенных структур.
Чтобы создать настраиваемые компоненты с определенной пользовательской структурой, которая не покрывается блоками Система Управления:
Используйте настраиваемый параметр real realp или обобщенную матрицу genmat для представления настраиваемых коэффициентов вашего компонента.
Используйте результат realp или genmat объекты как входы tf или ss для моделирования компонента. Результатом является обобщенное пространство состояний (genss) модель компонента.
Для примеров создания таких пользовательских настраиваемых компонентов смотрите:
Чтобы создать настраиваемую Обобщенную модель LTI, представляющую систему управления с как фиксированными, так и настраиваемыми компонентами:
Моделируйте нетронутые компоненты своей системы с помощью числовых моделей LTI.
Модель каждый настраиваемый компонент, используя Блоки Системы управления или выражения с участием таких блоков. См. Моделирование настраиваемых компонентов.
Используйте команды соединения моделей, такие как series, parallel или connect, или арифметические операторы +, -, *, /, \, и ^, чтобы объединить все компоненты вашей системы.
Получившаяся модель является:
A genss модель, если ни один из нетронутых компонентов не является моделью данных частотной характеристики (для примера, frd)
A genfrd модель, если неотключаемый компонент является frd модель
Для примера построения a genss модель системы управления с как фиксированными, так и настраиваемыми компонентами, см. Система управления с настраиваемыми компонентами.
Обобщенная модель отдельно хранит числовые и параметрические фрагменты модели путем структурирования модели в Standard Form, как показано на следующем рисунке.
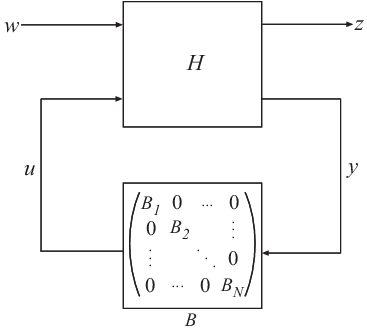
w и z представляют входы и выходы Обобщенной модели.
H представляет все фрагменты Обобщенной модели, которые имеют фиксированные (непараметрические) коэффициенты. H является:
Пространство состояний (ss) модель, для genss модели
Данные частотной характеристики (frd) модель, для genfrd модели
Матрица, для genmat модели
B представляет параметрические компоненты Обобщенной модели, которые являются Блоками Control Design B 1 ,. .. ., BN . The Blocks свойство Обобщенной модели хранит список имен этих блоков. Если Обобщенная модель имеет блоки, которые происходят несколько раз в B 1 ,. .. , BN , они перечислены только один раз в Blocks свойство.
Для доступа к внутреннему представлению Обобщенной модели, включая H и B, использовать getLFTModel команда.
Эта стандартная форма может представлять любую структуру управления. Чтобы понять, почему, рассмотрим структуру управления как агрегацию элементов с фиксированным коэффициентом, взаимодействующих с параметрическими элементами:
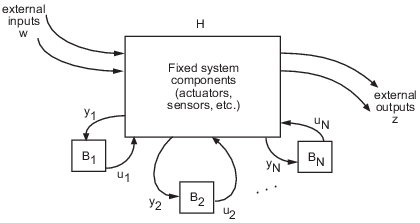
Чтобы переписать это в стандартной форме, задайте
и сгруппировать настраиваемые элементы управления B 1 ,. .. , BN в блок-диагональную C конфигурации. P включает все неподвижные компоненты архитектуры системы управления - приводы, датчики и другие нетронутые элементы - и их взаимосвязи.
