Vehicle Dynamics Blockset™ служит основой co-симуляции, которая моделирует ведущие алгоритмы в Simulink® и визуализирует их эффективность в 3D среде. Эта 3D среда симуляции использует Нереальный Engine® от Epic Games®.
Блоки Simulink, связанные с 3D средой симуляции, могут быть найдены в Vehicle Dynamics Blockset> Vehicle Scenarios> библиотека блоков Sim3D. Эти блоки обеспечивают способность к:
Сконфигурируйте предварительно созданные сцены в 3D среде симуляции.
Поместите и переместите транспортные средства в этих сценах.
Настройте камеры транспортные средства.
Симулируйте камеру выходные параметры на основе среды вокруг транспортного средства.
Этот инструмент симуляции обычно используется, чтобы добавить действительные данные при разработке, тестируя и проверяя эффективность транспортного средства автоматизированных ведущих алгоритмов. В сочетании с моделью транспортного средства можно использовать эти блоки, чтобы выполнить реалистические симуляции с обратной связью, которые охватывают целый автоматизированный ведущий стек от восприятия, чтобы управлять.
Для получения дополнительной информации о среде симуляции смотрите Как 3D Симуляция для работ Vehicle Dynamics Blockset.
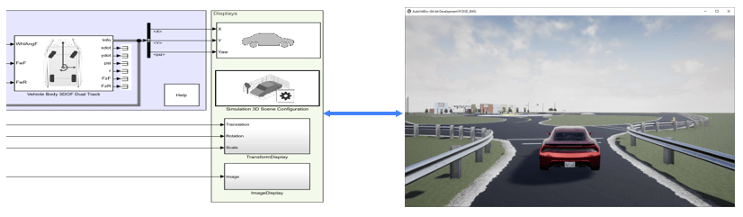
Чтобы сконфигурировать модель к co-simulate с 3D средой симуляции, добавьте блок Simulation 3D Scene Configuration (Automated Driving Toolbox) в модель. Используя этот блок, можно выбрать из набора предварительно созданных 3D сцен, где можно протестировать и визуализировать эффективность транспортного средства. Следующее изображение от Виртуальной сцены Макити.

Тулбокс включает эти сцены.
| Сцена | Описание |
|---|---|
| Straight Road | Прямой дорожный сегмент |
| Кервед-Роуд | Кривая, циклично выполненная дорога |
| Парковка | Пустая парковка |
| Двойное изменение маршрута | Стрэайт-Роуд с баррелями и дорожными знаками, которые настраиваются для выполнения двойного маневра изменения маршрута |
| Открытая поверхность | Плоский, черный тротуар появляется без дорожных объектов |
| Городской квартал США | Городской квартал с пересечениями, барьерами и светофором |
| Магистраль США | Магистраль с конусами, барьерами, светофором и дорожными знаками |
| Большая парковка | Парковка с припаркованными автомобилями, конусами, ограничениями и дорожными знаками |
| Виртуальный Макити | Городская среда, которая представляет открытую демонстрационную площадку Мичиганского университета (см. Тестовое Средство Макити); включает конусы, барьеры, животное, светофор и дорожные знаки |
Если у вас есть Интерфейс Vehicle Dynamics Blockset для Нереального Engine 4 пакета поддержки Проектов, то можно изменить эти сцены или создать новые единицы. Для получения дополнительной информации смотрите, Настраивают 3D Сцены для Симуляций Динамики аппарата.
Чтобы задать виртуальное транспортное средство в сцене, добавьте Simulation 3D Vehicle with Ground Following, Simulation 3D Vehicle, Simulation 3D Tractor или блок Simulation 3D Trailer к вашей модели. Используя блоки, можно управлять перемещением транспортного средства путем предоставления этих X, Y, и значений рыскания, которые задают его положение и ориентацию на каждом временном шаге.
Можно также задать цвет и тип транспортного средства. Тулбокс включает эти типы транспортного средства:
Можно задать виртуальные датчики и присоединить их в различных позициях по транспортным средствам. Тулбокс включает их моделирование датчика и блоки Configuration.
| Блок | Описание |
|---|---|
| Simulation 3D Camera Get | Обеспечивает интерфейс к идеальной камере в 3D среде визуализации. Изображение выход является красным, зеленым цветом, и синий (RGB) массив. |
| Simulation 3D Actor Transform Get | Получает перевод агента, вращение и шкалу для среды симуляции Simulink. |
| Simulation 3D Actor Transform Set | Устанавливает перевод агента, вращение и шкалу в Нереальном Engine 3D среда визуализации |
| Simulation 3D Message Get | Получает данные от Нереального Engine 3D среда визуализации. |
| Simulation 3D Message Set | Отправляет данные в Нереальный Engine 3D среда визуализации. |
Интерфейс Vehicle Dynamics Blockset для Нереального Engine 4 Проекта 3D блоки симуляции обеспечивает инструменты для тестирования и визуализации планирования пути, управления транспортным средством и алгоритмов восприятия.
После того, как вы проектируете и тестируете систему восприятия в 3D среде симуляции, можно затем использовать ее, чтобы управлять системой управления, которая на самом деле ведет транспортное средство. В этом случае, вместо того, чтобы вручную настроить траекторию, транспортное средство использует систему восприятия, чтобы управлять собой. Путем объединения восприятия и управления в систему с обратной связью в 3D среде симуляции, можно разработать и протестировать более комплексные алгоритмы, такие как хранение маршрута помогают и адаптивный круиз-контроль.
