Добавить транспортное средство к сценарию вождения
vc = vehicle(scenario)Vehicle объект, vc, к сценарию вождения, scenario. Транспортное средство имеет значения свойств по умолчанию.
Транспортные средства - специализированный тип актёрского кубовидного (коробчатого) объекта, имеющий четыре колеса. Дополнительные сведения об определении транспортных средств см. в разделе Позиции и размеры актера и транспортного средства.
vc = vehicle(scenario,Name,Value)
Примечание
Можно настроить транспортные средства в сценарии вождения так, чтобы они породили и опустошили, а затем импортировать связанные drivingScenario объект в приложение «Конструктор сценариев вождения». Приложение считает, что первое транспортное средство, созданное в сценарии вождения, является эго-транспортным средством и не позволяет эго-транспортному средству в сценарии созревать или унывать.
Создайте сценарий вождения, содержащий кривую дорогу, две прямые дороги и двух актеров: автомобиль и велосипед. Оба актёра двигаются по дороге в течение 60 секунд.
Создайте управляющий объект сценария.
scenario = drivingScenario('SampleTime',0.1','StopTime',60);
Создайте криволинейную дорогу, используя точки центра дороги, следующие за дугой окружности с 800-метровым радиусом. Дуга начинается с 0 °, заканчивается с 90 ° и отбирается с шагом 5 °.
angs = [0:5:90]'; R = 800; roadcenters = R*[cosd(angs) sind(angs) zeros(size(angs))]; roadwidth = 10; road(scenario,roadcenters,roadwidth);
Добавьте две прямые дороги с шириной по умолчанию, используя точки центра дороги на каждом конце.
roadcenters = [700 0 0; 100 0 0]; road(scenario,roadcenters)
ans =
Road with properties:
Name: ""
RoadID: 2
RoadCenters: [2x3 double]
RoadWidth: 6
BankAngle: [2x1 double]
roadcenters = [400 400 0; 0 0 0]; road(scenario,roadcenters)
ans =
Road with properties:
Name: ""
RoadID: 3
RoadCenters: [2x3 double]
RoadWidth: 6
BankAngle: [2x1 double]
Достань границы дороги.
rbdry = roadBoundaries(scenario);
Добавьте в сценарий автомобиль и велосипед. Расположите автомобиль в начале первой прямой дороги.
car = vehicle(scenario,'ClassID',1,'Position',[700 0 0], ... 'Length',3,'Width',2,'Height',1.6);
Расположите велосипед дальше по дороге.
bicycle = actor(scenario,'ClassID',3,'Position',[706 376 0]', ... 'Length',2,'Width',0.45,'Height',1.5);
Постройте график сценария.
plot(scenario,'Centerline','on','RoadCenters','on'); title('Scenario');

Отображение поз и профилей актера.
poses = actorPoses(scenario)
poses=2×1 struct array with fields:
ActorID
Position
Velocity
Roll
Pitch
Yaw
AngularVelocity
profiles = actorProfiles(scenario)
profiles=2×1 struct array with fields:
ActorID
ClassID
Length
Width
Height
OriginOffset
MeshVertices
MeshFaces
RCSPattern
RCSAzimuthAngles
RCSElevationAngles
Создайте сценарий управления. Установите время остановки для сценария равным 3 секундам.
scenario = drivingScenario('StopTime',3);Добавьте двухполосную дорогу к сценарию.
roadCenters = [0 1 0; 53 1 0];
laneSpecification = lanespec([1 1]);
road(scenario,roadCenters,'Lanes',laneSpecification);Добавьте другую дорогу, которая пересекает первую дорогу под прямым углом, чтобы сформировать Т-образную форму.
roadCenters = [20.3 38.4 0; 20 3 0];
laneSpecification = lanespec(2);
road(scenario,roadCenters,'Lanes',laneSpecification)ans =
Road with properties:
Name: ""
RoadID: 2
RoadCenters: [2x3 double]
RoadWidth: 7.3500
BankAngle: [2x1 double]
Добавьте ego-транспортное средство в сценарий и определите его ППМ. Задайте скорость эго-транспортного средства 20 м/с и создайте траектории для эго-транспортного средства.
egoVehicle = vehicle(scenario,'ClassID',1, ... 'Position',[1.5 2.5 0]); waypoints = [2 3 0; 13 3 0; 21 3 0; 31 3 0; 43 3 0; 47 3 0]; speed = 20; smoothTrajectory(egoVehicle,waypoints,speed)
Добавьте в сценарий транспортное средство, не являющееся эго. Задайте неэгоистическое транспортное средство для созревания и упадка два раза во время моделирования, указав векторы для времени входа и времени выхода. Обратите внимание, что каждое значение времени входа меньше соответствующего значения времени выхода.
nonEgovehicle1 = vehicle(scenario,'ClassID',1, ... 'Position',[22 30 0],'EntryTime',[0.2 1.4],'ExitTime',[1.0 2.0]);
Определите ППМ для транспортного средства, не являющегося эго. Установите скорость транспортного средства, не являющегося эго, 30 м/с и создайте его траектории.
waypoints = [22 35 0; 22 23 0;
22 13 0; 22 7 0;
18 -0.3 0; 12 -0.8 0; 5 -0.8 0];
speed = 30;
smoothTrajectory(nonEgovehicle1,waypoints,speed)Добавьте в сценарий еще одно транспортное средство, не являющееся эго. Задайте для второго неэгоистического транспортного средства один раз в процессе моделирования, указав время входа в качестве положительного скаляра. Поскольку время выхода не указано, это транспортное средство останется в сценарии до его окончания.
nonEgovehicle2 = vehicle(scenario,'ClassID',1, ... 'Position',[48 -1 0],'EntryTime',2);
Определите ППМ для второго транспортного средства, не являющегося эго. Установите скорость транспортного средства 50 м/с и создайте его траектории.
waypoints = [48 -1 0; 42 -1 0; 28 -1 0;
16 -1 0; 12 -1 0];
speed = 50;
smoothTrajectory(nonEgovehicle2,waypoints,speed)Создайте пользовательское окно фигуры для печати сценария.
fig = figure; set(fig,'Position',[0 0 600 600]) movegui(fig,'center') hViewPnl = uipanel(fig,'Position',[0 0 1 1],'Title','Vehicle Spawn and Despawn'); hPlt = axes(hViewPnl);
Постройте график сценария и выполните моделирование. Наблюдайте за тем, как неэгоистические транспортные средства созревают и унывают в сценарии во время моделирования.
plot(scenario,'Waypoints','on','Parent',hPlt) while advance(scenario) pause(0.1) end

scenario - Сценарий вожденияdrivingScenario объектСценарий управления, указанный как drivingScenario объект.
Укажите дополнительные пары, разделенные запятыми Name,Value аргументы. Name является именем аргумента и Value - соответствующее значение. Name должен отображаться внутри кавычек. Можно указать несколько аргументов пары имен и значений в любом порядке как Name1,Value1,...,NameN,ValueN.
vehicle('Length',2.2,'Width',0.6,'Height',1.5) создает транспортное средство, имеющее размеры мотоцикла. Единицы в метрах.'Name' - Наименование транспортного средства"" (по умолчанию) | символьный вектор | строковый скалярНаименование транспортного средства, указанное как разделенная запятыми пара, состоящая из: 'Name' и вектор символов или строковый скаляр.
Пример: 'Name','Vehicle1'
Пример: "Name","Vehicle1"
Типы данных: char | string
'EntryTime' - Время входа транспортного средства на нерест0 (по умолчанию) | положительный скалярВремя входа транспортного средства в действие в сценарии вождения, определяемое как разделенная запятыми пара, состоящая из: 'EntryTime' и положительный скаляр или вектор положительных значений. Единицы измерения измеряются в секундах с момента начала сценария.
Укажите этот аргумент пары имя-значение, чтобы добавить или сделать транспортное средство отображаемым в сценарии вождения в указанное время во время выполнения моделирования.
Чтобы создать транспортное средство только один раз, укажите время входа как скаляр.
Чтобы создать транспортное средство несколько раз, укажите время входа в качестве вектора.
Расположите элементы вектора в порядке возрастания.
Длина вектора должна соответствовать длине вектора времени выхода.
Если транспортное средство имеет соответствующее время выезда, то каждое значение времени въезда должно быть меньше соответствующего значения времени выезда.
Каждое значение времени входа должно быть меньше времени остановки сценария. Можно задать время остановки для сценария, указав значение для 'StopTime' имущества drivingScenario объект.
Пример: 'EntryTime',2
Пример: 'EntryTime',[2 4]
Типы данных: single | double | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64
'ExitTime' - Время выезда транспортного средства в отчаяниеInf (по умолчанию) | положительный скалярВремя выхода транспортного средства из сценария вождения, определяемое как разделенная запятыми пара, состоящая из: 'ExitTime' и положительный скаляр или вектор положительных значений. Единицы измерения измеряются в секундах с момента начала сценария.
Укажите этот аргумент пары имя-значение, чтобы удалить или заставить транспортное средство исчезнуть из сценария в указанное время во время выполнения моделирования.
Чтобы сбросить транспортное средство только один раз, укажите время выхода как скаляр.
Чтобы сбросить транспортное средство несколько раз, укажите время съезда в качестве вектора.
Расположите элементы вектора в порядке возрастания.
Длина вектора должна соответствовать длине вектора времени входа.
Если транспортное средство имеет соответствующее время въезда, то каждое значение времени выезда должно быть больше соответствующего значения времени въезда.
Каждое значение времени выхода должно быть меньше времени остановки сценария. Можно задать время остановки для сценария, указав значение для 'StopTime' имущества drivingScenario объект.
Пример: 'ExitTime',3
Пример: 'ExitTime',[3 6]
Типы данных: single | double | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64
'PlotColor' - Цвет отображения транспортного средстваЦвет отображения транспортного средства, указанный как разделенная запятыми пара, состоящая из: 'PlotColor' и триплет RGB, шестнадцатеричный код цвета, имя цвета или короткое имя цвета.
Транспортное средство отображается указанным цветом во всех программных визуализациях сценария, включая plot функция, chasePlot функции и функции печати birdsEyePlot объекты. При импорте сценария в приложение «Конструктор сценариев вождения» транспортное средство отображается в этом цвете во всех визуализациях приложения. При импорте сценария в Simulink ® транспортное средство отображается в этом цвете в области «Птичий глаз».
Если цвет для транспортного средства не указан, функция назначает его на основе порядка цветов по умолчанию Axes объекты. Дополнительные сведения см. в разделе ColorOrder свойство для Axes объекты.
Для пользовательского цвета укажите триплет RGB или шестнадцатеричный цветовой код.
Триплет RGB - это трехэлементный вектор строки, элементы которого задают интенсивности красной, зеленой и синей составляющих цвета. Интенсивности должны находиться в диапазоне [0,1]; например, [0.4 0.6 0.7].
Шестнадцатеричный цветовой код - это символьный вектор или строковый скаляр, начинающийся с хэш-символа (#), за которыми следуют три или шесть шестнадцатеричных цифр, которые могут варьироваться от 0 кому F. Значения не чувствительны к регистру. Таким образом, цветовые коды '#FF8800', '#ff8800', '#F80', и '#f80' эквивалентны.
Можно также задать некоторые общие цвета по имени. В этой таблице перечислены параметры именованного цвета, эквивалентные триплеты RGB и шестнадцатеричные цветовые коды.
| Имя цвета | Краткое имя | Триплет RGB | Шестнадцатеричный цветовой код | Внешность |
|---|---|---|---|---|
'red' | 'r' | [1 0 0] | '#FF0000' |
|
'green' | 'g' | [0 1 0] | '#00FF00' |
|
'blue' | 'b' | [0 0 1] | '#0000FF' |
|
'cyan' | 'c' | [0 1 1] | '#00FFFF' |
|
'magenta' | 'm' | [1 0 1] | '#FF00FF' |
|
'yellow' | 'y' | [1 1 0] | '#FFFF00' |
|
'black' | 'k' | [0 0 0] | '#000000' |
|
'white' | 'w' | [1 1 1] | '#FFFFFF' |
|
Вот триплеты RGB и шестнадцатеричные цветовые коды для цветов по умолчанию MATLAB ®, используемых на многих типах графиков.
| Триплет RGB | Шестнадцатеричный цветовой код | Внешность |
|---|---|---|
[0 0.4470 0.7410] | '#0072BD' |
|
[0.8500 0.3250 0.0980] | '#D95319' |
|
[0.9290 0.6940 0.1250] | '#EDB120' |
|
[0.4940 0.1840 0.5560] | '#7E2F8E' |
|
[0.4660 0.6740 0.1880] | '#77AC30' |
|
[0.3010 0.7450 0.9330] | '#4DBEEE' |
|
[0.6350 0.0780 0.1840] | '#A2142F' |
|
'Position' - Положение центра транспортного средства[0 0 0] (по умолчанию) | [x
y z] действительный
векторПоложение центра вращения транспортного средства, указанное как разделенная запятыми пара, состоящая из: 'Position' и [x
y z] действительный
вектор.
Центр вращения транспортного средства - середина его задней оси. Транспортное средство проходит назад на расстояние, равное заднему свесу. Транспортное средство выдвигается вперед на расстояние, равное сумме колесной базы и переднего свеса. Единицы в метрах.
Пример: [10;50;0]
'Velocity' - Скорость движения центра транспортного средства[0 0 0] (по умолчанию) | [vx
vy vz] действительный
векторСкорость (v) центра транспортного средства в направлениях x, y и z, указанная как пара, разделенная запятыми, состоящая из: 'Velocity' и [vx
vy vz] действительный
вектор. 'Position' пара «имя-значение» определяет центр транспортного средства. Единицы измерения в метрах в секунду.
Пример: [-4;7;10]
'Yaw' - Угол рыскания транспортного средства0 (по умолчанию) | вещественный скалярУгол рыскания транспортного средства, указанный как разделенная запятыми пара, состоящая из: 'Yaw' и реальный скаляр. Yaw - угол поворота транспортного средства вокруг оси Z. Рыскание по часовой стрелке - положительное при взгляде в прямом направлении оси, которая указывает вверх от земли. Поэтому при просмотре транспортных средств сверху вниз, как, например, на графике птичьего глаза, рыскание против часовой стрелки-положительное. Значения углов переносятся в диапазон [-180, 180]. Единицы измерения в градусах.
Пример: -0.4
'Pitch' - Угол наклона транспортного средства0 (по умолчанию) | вещественный скалярУгол наклона транспортного средства, определяемый как разделенная запятыми пара, состоящая из: 'Pitch' и реальный скаляр. Шаг представляет собой угол поворота транспортного средства вокруг оси y и является положительным по часовой стрелке при взгляде в прямом направлении оси. Значения углов переносятся в диапазон [-180, 180]. Единицы измерения в градусах.
Пример: 5.8
'Roll' - Угол крена транспортного средства0 (по умолчанию) | вещественный скалярУгол крена транспортного средства, указанный как разделенная запятыми пара, состоящая из: 'Roll' и реальный скаляр. Крен представляет собой угол поворота транспортного средства вокруг оси Х и является положительным по часовой стрелке при взгляде в направлении оси вперед. Значения углов переносятся в диапазон [-180, 180]. Единицы измерения в градусах.
Пример: -10
'AngularVelocity' - Угловая скорость транспортного средства[0 0 0] (по умолчанию) | [
Угловая скорость (λ) транспортного средства в мировых координатах, определяемая как разделенная запятыми пара, состоящая из: 'AngularVelocity' и вектор, который имеет
действительное значение
. Единицы измерения в градусах в секунду.
Пример: [20 40 20]
'Length' - Длина транспортного средства4.7 (по умолчанию) | положительный вещественный скалярДлина транспортного средства, указанная как разделенная запятыми пара, состоящая из: 'Length' и положительный действительный скаляр. Единицы в метрах.
В Vehicle , это уравнение определяет значения Length, FrontOverhang, Wheelbase, и RearOverhang свойства:
Length = FrontOverhang + Wheelbase + RearOverhang
При обновлении Length, RearOverhang, или Wheelbase свойство, для поддержания уравнения, Vehicle объект увеличивает или уменьшает FrontOverhang и сохраняет другие свойства постоянными.
При обновлении FrontOverhang свойство, для поддержания этого уравнения, Vehicle объект увеличивает или уменьшает Wheelbase и сохраняет другие свойства постоянными.
При установке обоих FrontOverhang и RearOverhang свойства, чтобы предотвратить Vehicle от переопределения объекта FrontOverhang значение, установка RearOverhang сначала, затем FrontOverhang. Объект вычисляет новое Wheelbase значение свойства автоматически.
Пример: 5.5
'Width' - Ширина транспортного средства1.8 (по умолчанию) | положительный вещественный скалярШирина транспортного средства, указанная как разделенная запятыми пара, состоящая из: 'Width' и положительный действительный скаляр. Единицы в метрах.
Пример: 2.0
'Height' - Высота транспортного средства1.4 (по умолчанию) | положительный вещественный скалярВысота транспортного средства, указанная как разделенная запятыми пара, состоящая из: 'Height' и положительный действительный скаляр. Единицы в метрах.
Пример: 2.1
'Mesh' - Расширенная сетка объектаextendedObjectMesh объектРасширенная сетка объекта, заданная как extendedObjectMesh объект.
'RCSPattern' - Схема сечения РЛС транспортного средства[10 10; 10 10] (по умолчанию) | матрица вещественных значений Q-by-PСхема поперечного сечения (RCS) транспортного средства, указанная как разделенная запятыми пара, состоящая из: 'RCSPattern' и матрицу вещественных значений Q-by-P. РСК - функция углов азимута и места, где:
Q - количество углов места, определяемых 'RCSElevationAngles' пара имя-значение.
P - количество азимутальных углов, указанных 'RCSAzimuthAngles' пара имя-значение.
Единицы измерения в децибелах на квадратный метр (дБсм).
Пример: 5.8
'RCSAzimuthAngles' - Азимутальные углы схемы РСУ транспортного средства[-180 180] (по умолчанию) | P-элемент действительный векторАзимутальные углы модели RCS транспортного средства, указанные как разделенная запятыми пара, состоящая из: 'RCSAzimuthAngles' и P-элемент вещественно-значного вектора. P - количество азимутальных углов. Значения находятся в диапазоне [-180 °, 180 °].
Каждый элемент RCSAzimuthAngles определяет азимутальный угол соответствующего столбца 'RCSPattern' пара имя-значение. Единицы измерения в градусах.
Пример: [-90:90]
'RCSElevationAngles' - Углы возвышения модели RCS транспортного средства[-90 90] (по умолчанию) | Q-элемент действительный векторУглы возвышения модели RCS транспортного средства, указанные как разделенная запятыми пара, состоящая из: 'RCSElevationAngles' и Q-элементный действительный вектор. Q - количество углов возвышения. Значения находятся в диапазоне [-90 °, 90 °].
Каждый элемент RCSElevationAngles определяет угол возвышения соответствующей строки 'RCSPattern' пара имя-значение. Единицы измерения в градусах.
Пример: [0:90]
'FrontOverhang' - Передний свес транспортного средства0.9 (по умолчанию) | вещественный скалярПередний свес транспортного средства, указанный как разделенная запятыми пара, состоящая из: 'FrontOverhang' и реальный скаляр. Передний свес - это расстояние, на которое транспортное средство выходит за пределы передней оси. Если транспортное средство не проходит мимо передней оси, то передний свес отрицательный. Единицы в метрах.
В Vehicle , это уравнение определяет значения Length, FrontOverhang, Wheelbase, и RearOverhang свойства:
Length = FrontOverhang + Wheelbase + RearOverhang
При обновлении Length, RearOverhang, или Wheelbase свойство, для поддержания уравнения, Vehicle объект увеличивает или уменьшает FrontOverhang и сохраняет другие свойства постоянными.
При обновлении FrontOverhang свойство, для поддержания этого уравнения, Vehicle объект увеличивает или уменьшает Wheelbase и сохраняет другие свойства постоянными.
При установке обоих FrontOverhang и RearOverhang свойства, чтобы предотвратить Vehicle от переопределения объекта FrontOverhang значение, установка RearOverhang сначала, затем FrontOverhang. Объект вычисляет новое Wheelbase значение свойства автоматически.
Пример: 0.37
'RearOverhang' - Задний свес транспортного средства1.0 (по умолчанию) | вещественный скалярЗадний свес транспортного средства, указанный как разделенная запятыми пара, состоящая из: 'RearOverhang' и реальный скаляр. Задний свес - это расстояние, на которое транспортное средство выходит за пределы задней оси. Если транспортное средство не проходит мимо задней оси, то задний свес отрицательный. Отрицательный задний свес распространён в полуприцепах, где кабина грузовика не нависает над задним колесом. Единицы в метрах.
В Vehicle , это уравнение определяет значения Length, FrontOverhang, Wheelbase, и RearOverhang свойства:
Length = FrontOverhang + Wheelbase + RearOverhang
При обновлении Length, RearOverhang, или Wheelbase свойство, для поддержания уравнения, Vehicle объект увеличивает или уменьшает FrontOverhang и сохраняет другие свойства постоянными.
При обновлении FrontOverhang свойство, для поддержания этого уравнения, Vehicle объект увеличивает или уменьшает Wheelbase и сохраняет другие свойства постоянными.
При установке обоих FrontOverhang и RearOverhang свойства, чтобы предотвратить Vehicle от переопределения объекта FrontOverhang значение, установка RearOverhang сначала, затем FrontOverhang. Объект вычисляет новое Wheelbase значение свойства автоматически.
Пример: 0.32
'Wheelbase' - Расстояние между осями транспортных средств2.8 (по умолчанию) | положительный вещественный скалярРасстояние между передней и задней осями транспортного средства, определяемое как разделенная запятыми пара, состоящая из: 'Wheelbase' и положительный действительный скаляр. Единицы в метрах.
В Vehicle , это уравнение определяет значения Length, FrontOverhang, Wheelbase, и RearOverhang свойства:
Length = FrontOverhang + Wheelbase + RearOverhang
При обновлении Length, RearOverhang, или Wheelbase свойство, для поддержания уравнения, Vehicle объект увеличивает или уменьшает FrontOverhang и сохраняет другие свойства постоянными.
При обновлении FrontOverhang свойство, для поддержания этого уравнения, Vehicle объект увеличивает или уменьшает Wheelbase и сохраняет другие свойства постоянными.
При установке обоих FrontOverhang и RearOverhang свойства, чтобы предотвратить Vehicle от переопределения объекта FrontOverhang значение, установка RearOverhang сначала, затем FrontOverhang. Объект вычисляет новое Wheelbase значение свойства автоматически.
Пример: 1.51
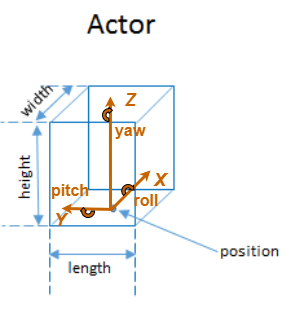
В сценариях вождения актёром является кубовидный (коробчатый) объект с определёнными длиной, шириной и высотой. Актеры также имеют схему радиолокационного сечения (RCS), заданную в дБсм, которую можно уточнить, задав угловые координаты азимута и отметки. Положение актера определяется как центр его нижней грани. Эта центральная точка используется в качестве центра вращения актера, точки контакта с землей и начала координат в локальной системе координат. В этой системе координат:
Ось X указывает вперед от актера.
Точки оси Y, оставшиеся от актера.
Ось Z указывает вверх от земли.
Крен, шаг и рыскание являются положительными по часовой стрелке при взгляде в прямом направлении осей X, Y и Z соответственно.
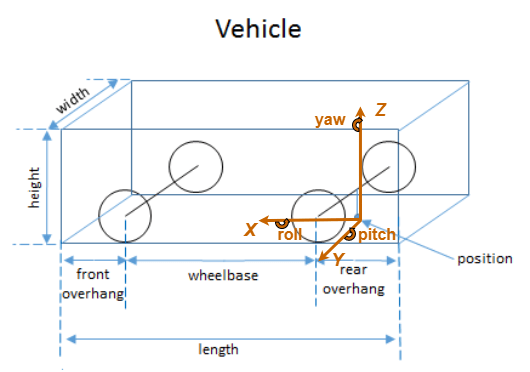
Транспортное средство - это актер, который передвигается на колесах. Транспортные средства обладают тремя дополнительными свойствами, регулирующими расположение их передней и задней осей.
Колесная база - расстояние между передней и задней осями
Передний свес - расстояние между передней частью транспортного средства и передней осью
Задний свес - расстояние между задней осью и задней частью транспортного средства
В отличие от других типов действующих лиц, положение транспортного средства определяется точкой на земле, которая находится ниже центра его задней оси. Эта точка соответствует естественному центру вращения транспортного средства. Как и в случае транспортных средств, эта точка является началом координат в локальной системе координат транспортного средства, где:
Ось X указывает вперед от транспортного средства.
Точки оси Y, оставшиеся от транспортного средства.
Ось Z указывает вверх от земли.
Крен, шаг и рыскание являются положительными по часовой стрелке при взгляде в прямом направлении осей X, Y и Z соответственно.
В этой таблице представлен список общих субъектов и их измерений. Чтобы указать эти значения в Actor и Vehicle задайте соответствующие отображаемые свойства.
| Классификация актёров | Объект-исполнитель | Свойства актера | ||||||
|---|---|---|---|---|---|---|---|---|
Length | Width | Height | FrontOverhang | RearOverhang | Wheelbase | RCSPattern | ||
| Пешеход | Actor | 0,24 м | 0,45 м | 1,7 м | Н/Д | Н/Д | Н/Д | -8 дБсм |
| Автомобиль | Vehicle | 4,7 м | 1,8 м | 1,4 м | 0,9 м | 1,0 м | 2,8 м | 10 дБсм |
| Мотоцикл | Vehicle | 2,2 м | 0,6 м | 1,5 м | 0,37 м | 0,32 м | 1,51 м | 0 дБсм |
