Automated Driving Toolbox™ служит основой co-симуляции для моделирования и визуализации ведущих алгоритмов в Simulink® в 3D среде. Эта среда симуляции использует Нереальный Engine Эпическими Играми.
С этой средой симуляции можно сконфигурировать предварительно созданные сцены, место и переместить транспортные средства в сцене, и настроить и симулировать камеру, радар, или лоцировать датчики на транспортных средствах. Используйте эту среду, чтобы разработать, протестировать, и проверить производительность восприятия, планирования пути и алгоритмов управления, включая алгоритмы с обратной связью. Чтобы узнать больше, смотрите 3D Симуляцию для Автоматизированного Управления.
| Bird's-Eye Scope | Визуализируйте покрытия датчика, обнаружения и дорожки |
3D симуляция для автоматизированного управления
Узнать, как моделировать ведущие алгоритмы в Simulink и визуализировать их производительность в 3D среде с помощью Нереального Engine от Эпических Игр.
3D требования среды симуляции и ограничения
При симуляции в 3D среде с помощью Нереального Engine сохраните эти требования к программному обеспечению, минимальные рекомендации по аппаратным средствам и ограничения в памяти.
Как 3D симуляция для автоматизированных ведущих работ
Узнайте о среде co-симуляции между Simulink и Нереальным Engine и как порядок выполнения блока влияет на 3D симуляцию.
Системы координат для 3D симуляции в Automated Driving Toolbox
Изучите мир и системы координат транспортного средства при симуляции в 3D среде.
Выберите Sensor для 3D симуляции
Решите который камера, лидар или радарные датчики, чтобы использовать во время 3D симуляции с Нереальным Engine.
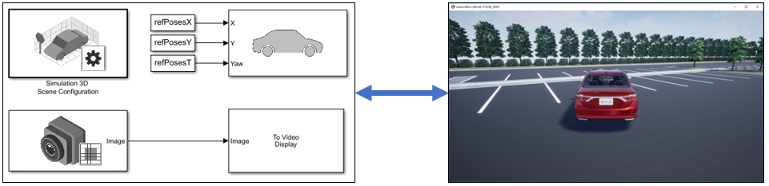
Симулируйте простой ведущий сценарий и датчик в 3D среде
Изучите основы конфигурирования и симуляции сцен, транспортных средств и датчиков в 3D среде, приводимой в действие Нереальным Engine от Эпических Игр.
Визуализируйте глубину и данные о Семантической Сегментации в 3D среде
Визуализируйте глубину и данные о семантической сегментации, собранные от датчика камеры в 3D среде симуляции.
Визуализируйте 3D покрытия датчика симуляции и обнаружения
Визуализируйте зоны охвата датчика и обнаружения, полученные из высокочастотного радара, и лоцируйте датчики в 3D среде симуляции.
Настройте 3D сцены для автоматизированного управления
Настройте 3D сцены для автоматизированных ведущих приложений.
Примените метки Семантической Сегментации к пользовательским сценам
Примените метки к объектам в сцене так, чтобы можно было получить данные о семантической сегментации из датчика камеры.






