Облако точек из Kinect для Windows
ptCloud = pcfromkinect(depthDevice,depthImage)depthDevice Вход может быть либо a videoinput (Image Acquisition Toolbox) или объект imaq.VideoDevice (Image Acquisition Toolbox) объект, настроенный для Kinect (версии 1 и 2) для Windows®.
Для выполнения этой функции требуется программное обеспечение Image Acquisition Toolbox™, поддерживающее Kinect для Windows.
ptCloud = pcfromkinect(depthDevice,depthImage,colorImage)colorImage вход.
Система Kinect для Windows, предназначенная для игр, производит depthImage и colorImage как зеркальные изображения сцены. Возвращенное облако точек корректируется в соответствии с фактической сценой.
ptCloud = pcfromkinect(depthDevice,depthImage,colorImage,alignment)
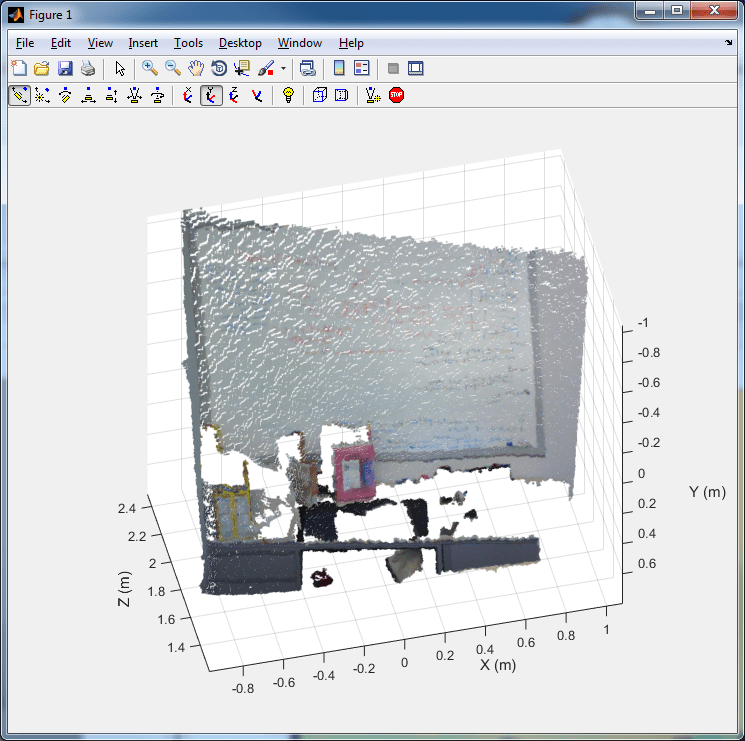
Постройте график цветового облака точек из изображений Kinect. Этот пример требует программного обеспечения Image Acquisition Toolbox и камеры Kinect и подключения к камере.
Создайте Системную object™ для цветового устройства.
colorDevice = imaq.VideoDevice('kinect',1)
Создайте системный объект для устройства глубины.
depthDevice = imaq.VideoDevice('kinect',2)
Инициализируйте камеру.
step(colorDevice); step(depthDevice);
Загрузите одну систему координат с устройства.
colorImage = step(colorDevice); depthImage = step(depthDevice);
Извлеките облако точек.
ptCloud = pcfromkinect(depthDevice,depthImage,colorImage);
Инициализируйте проигрыватель облака точек, чтобы визуализировать 3-D данные облака точек. Ось задается соответствующим образом, чтобы визуализировать облако точек от Kinect.
player = pcplayer(ptCloud.XLimits,ptCloud.YLimits,ptCloud.ZLimits,... 'VerticalAxis','y','VerticalAxisDir','down'); xlabel(player.Axes,'X (m)'); ylabel(player.Axes,'Y (m)'); zlabel(player.Axes,'Z (m)');
Получите и просмотрите 500 системы координат живых данных облака точек Kinect.
for i = 1:500 colorImage = step(colorDevice); depthImage = step(depthDevice); ptCloud = pcfromkinect(depthDevice,depthImage,colorImage); view(player,ptCloud); end
Отпустите объекты.
release(colorDevice); release(depthDevice);
depthDevice - Входной видеообъектvideoinput | объекта imaq.VideoDevice объект Входной объект видео, заданный как a videoinput (Image Acquisition Toolbox) или объект imaq.VideoDevice Объект (Image Acquisition Toolbox), настроенный для Kinect для Windows.
depthImage - Изображение глубиныИзображение глубины, заданное как M -by N пиксельная матрица. Оригинальные изображения, depthImage и colorImage, из Kinect являются зеркальными изображениями сцены.
Глубинная камера Kinect имеет ограниченную область значений. Ограниченная область значений глубинной камеры Kinect может привести к тому, что значения пикселей в глубинном изображении не будут иметь соответствующих координат 3-D. Эти отсутствующие пиксельные значения установлены в NaN в Location свойство возвращенного облака точек.
Типы данных: uint16
colorImage - Цветное изображениеЦветное изображение, заданное как M -by- N -by-3 изображение RGB truecolor, которое возвращает Kinect. Оригинальные изображения, depthImage и colorImage, из Kinect являются зеркальными изображениями сцены.
Типы данных: uint8
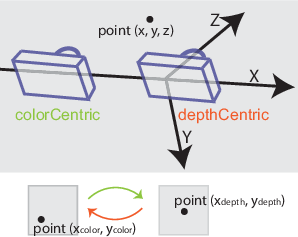
alignment - Направление системы координат изображения'colorCentric' (по умолчанию) | 'depthCentric'Направление системы координат изображения, заданное как вектор символов 'colorCentric' или 'depthCentric'. Установите это значение равным 'colorCentric' для выравнивания depthImage с colorImage. Задайте alignment на 'depthCentric' для выравнивания colorImage с depthImage.
Источник правой мировой системы координат находится в центре камеры глубины. x -ось системы координат указывает вправо, y -ось - вниз, а z -ось - от камеры.
Примечание
Для согласованности между Computer Vision Toolbox™ использованием систем координат система координат, заданная этой функцией, отличается от системы координат, заданной метаданными Kinect Skeletal.
pcdenoise | pcdownsample | pcfitplane | pcmerge | pcplayer | pcread | pcregistericp | pcshow | pcwrite | planeModel | plot3 | pointCloud | reconstructScene | scatter3 | triangulate
