Зарегистрируйте две облака точек с помощью алгоритма ICP
tform = pcregistericp(moving,fixed)
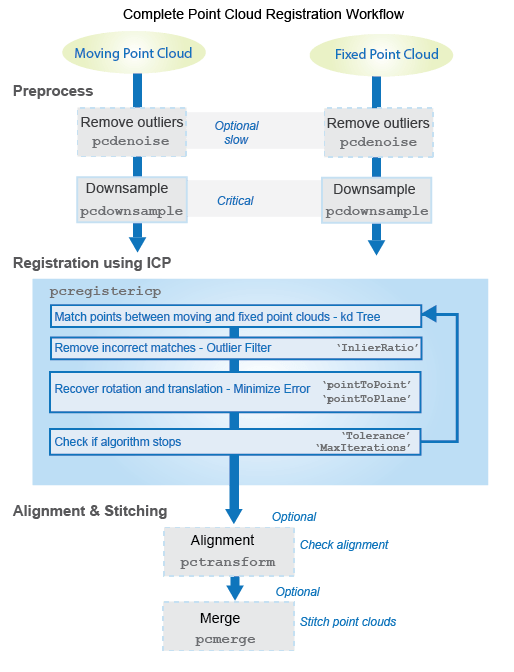
Алгоритм регистрации основан на «итерационном алгоритме ближайшей точки» (ICP). Лучшая эффективность этого итерационного процесса требует корректировки свойств для ваших данных. Рассмотрите понижение дискретизации облаков точек с помощью pcdownsample перед использованием pcregistericp повышение точности и эффективности регистрации.
Нормали облака точек требуются алгоритмом регистрации, когда вы выбираете 'pointToPlane' метрический. Поэтому, если входное облако точек Normal свойство пустое, функция заполняет его. Когда функция заполняет Normal свойство, оно использует 6 точек, чтобы соответствовать локальной плоскости. Шесть точек могут не сработать при любых обстоятельствах. Если регистрация в 'pointToPlane' metric fails, рассмотрите вызов pcnormals функция, которая позволяет вам выбрать число точек для использования.
[___] = pcregistericp( использует дополнительные опции, заданные одним или несколькими moving,fixed,Name,Value)Name,Value аргументы в виде пар.
Загрузка данных облака точек.
ptCloud = pcread('teapot.ply'); pcshow(ptCloud); title('Teapot');

Создайте объект преобразования с поворотом на 30 степени вдоль оси z и перемещением [5,5,10].
A = [cos(pi/6) sin(pi/6) 0 0; ... -sin(pi/6) cos(pi/6) 0 0; ... 0 0 1 0; ... 5 5 10 1]; tform1 = affine3d(A);
Преобразуйте облако точек.
ptCloudTformed = pctransform(ptCloud,tform1);
pcshow(ptCloudTformed);
title('Transformed Teapot');
Применить жесткую регистрацию.
tform = pcregistericp(ptCloudTformed,ptCloud,'Extrapolate',true);Сравните результат с истинным преобразованием.
disp(tform1.T);
0.8660 0.5000 0 0
-0.5000 0.8660 0 0
0 0 1.0000 0
5.0000 5.0000 10.0000 1.0000
tform2 = invert(tform); disp(tform2.T);
0.8660 0.5000 0.0000 0
-0.5000 0.8660 0.0000 0
-0.0000 -0.0000 1.0000 0
5.0000 5.0000 10.0000 1.0000
[1] Chen, Y. and G. Medioni. Моделирование объекта путем регистрации изображений нескольких областей значений. Image Vision Computing. Баттерворт-Хайнеман. Том 10, выпуск 3, апрель 1992 года, стр. 145-155.
[2] Besl, Paul J., N. D. McKay. «Метод регистрации 3-D фигур». Транзакции IEEE по шаблонному анализу и машинному анализу. Los Alamitos, CA: IEEE Computer Society. Том 14, Выпуск 2, 1992, стр. 239-256.
pcdenoise | pcdownsample | pcfitplane | pcmerge | pcregistercorr | pcregistercpd | pcregisterndt | pcshow | pcshowpair | pctransform