Зарегистрируйте две облака точек с помощью алгоритма CPD
tform = pcregistercpd(moving,fixed)
Примечание
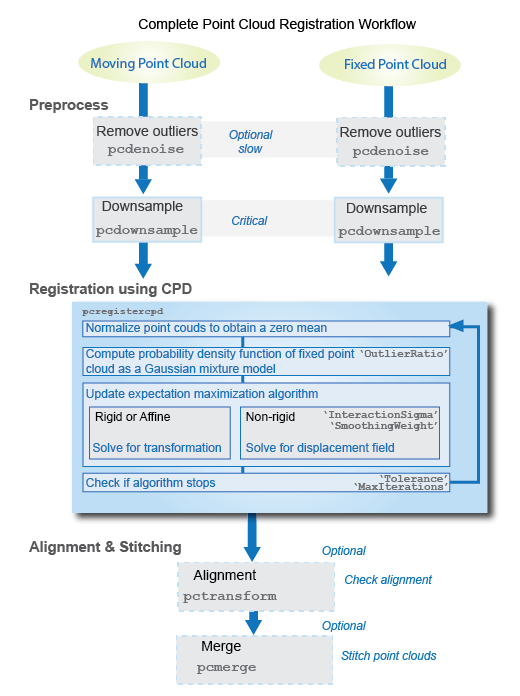
Рассмотрите понижение дискретизации облаков точек с помощью pcdownsample перед использованием pcregistercpd для повышения эффективности регистрации.
[___] = pcregistercpd( использует дополнительные опции, заданные одним или несколькими moving,fixed,Name,Value)Name,Value аргументы в виде пар.
Загрузите данные облака точек в рабочую область. Извлеките движущиеся облака и облака фиксированных точек из данных облака точек в рабочей области.
handData = load('hand3d.mat');
moving = handData.moving;
fixed = handData.fixed;Чтобы улучшить эффективность и точность алгоритма регистрации CPD, понижайте частоту движущихся и фиксированных облаков точек.
movingDownsampled = pcdownsample(moving,'gridAverage',0.03); fixedDownsampled = pcdownsample(fixed,'gridAverage',0.03);
Отображение облаков точек с понижающей дискретизацией перед регистрацией.
figure pcshowpair(movingDownsampled,fixedDownsampled,'MarkerSize',50) xlabel('X') ylabel('Y') zlabel('Z') title('Point clouds before registration') legend({'Moving point cloud','Fixed point cloud'},'TextColor','w') legend('Location','southoutside')

Выполните нежесткую регистрацию с помощью алгоритма CPD.
tform = pcregistercpd(movingDownsampled,fixedDownsampled); movingReg = pctransform(movingDownsampled,tform);
Отображение облаков точек с понижающей дискретизацией после регистрации.
figure pcshowpair(movingReg,fixedDownsampled,'MarkerSize',50) xlabel('X') ylabel('Y') zlabel('Z') title('Point clouds after registration') legend({'Moving point cloud','Fixed point cloud'},'TextColor','w') legend('Location','southoutside')

[1] Мыроненко, А., и X. Сонг. "Регистрация набора точек: когерентный дрейф точек. "Труды по транзакциям IEEE по шаблонному анализу и машинной разведке (TPAMI). Том 32, № 12, декабрь 2010, стр. 2262-2275.
pcdenoise | pcdownsample | pcfitplane | pcmerge | pcregistercorr | pcregistericp | pcregisterndt | pcshow | pcshowpair | pctransform