Зарегистрируйте две облака точек с помощью алгоритма NDT
tform = pcregisterndt(moving,fixed,gridStep)gridStep.
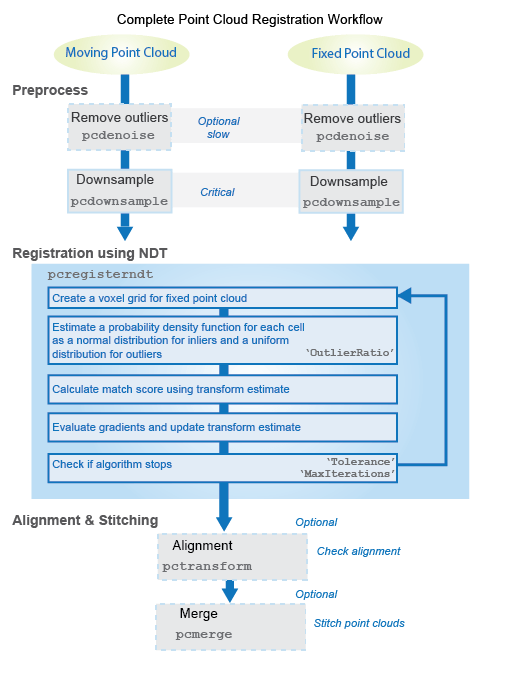
Алгоритм регистрации основан на алгоритме преобразования нормальных распределений (NDT) [1]
. Лучшая [2]эффективность этого итерационного процесса требует корректировки свойств для ваших данных. Чтобы улучшить точность и эффективность регистрации, рассмотрите понижение дискретизации облаков точек с помощью pcdownsample перед использованием pcregisterndt.
[___] = pcregisterndt( использует дополнительные опции, заданные одним или несколькими moving,fixed,gridStep,Name,Value)Name,Value аргументы в виде пар.
Загрузка данных облака точек.
ld = load('livingRoom.mat'); moving = ld.livingRoomData{1}; fixed = ld.livingRoomData{2}; pcshowpair(moving,fixed,'VerticalAxis','Y','VerticalAxisDir','Down')

Чтобы улучшить эффективность и точность алгоритма регистрации NDT, уменьшите значение движущееся облако точек.
movingDownsampled = pcdownsample(moving,'gridAverage',0.1);Вокселизируйте облако точек в кубы боковой длины 0,5. Применить жесткую регистрацию с помощью алгоритма NDT.
gridStep = 0.5; tform = pcregisterndt(movingDownsampled,fixed,gridStep);
Визуализируйте выравнивание.
movingReg = pctransform(moving,tform); pcshowpair(movingReg,fixed,'VerticalAxis','Y','VerticalAxisDir','Down')

[1] Бибер, П. и У. Страсер. Преобразование нормальных распределений: новый подход к лазерному Сопоставлению сканов. Материалы Международной конференции IEEE/RSJ по интеллектуальным роботам и системам (IROS). Лас-Вегас, НВ. Том 3, ноябрь 2003 года, стр. 2743-2748.
[2] Магнуссон, М. «Трехмерное преобразование нормальных распределений - эффективное представление для регистрации, анализа поверхности и обнаружения цикла». Доктор философии. Дипломная работа. Университет Örebro, Örebro, Швеция, 2013.
pcdenoise | pcdownsample | pcfitplane | pcmerge | pcregistercorr | pcregistercpd | pcregistericp | pcshow | pcshowpair | pctransform