Геометрический якобиан для строения робота
Алгоритмы Robotics System Toolbox/Manipulator
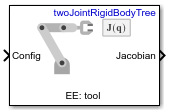
Блок Get Jacobian возвращает геометрический якобиан относительно основы для заданного концевого эффектора при заданном строении rigidBodyTree модель робота.
Якобиан отображает скорость в пространстве соединений на скорость в конце эффектора относительно координатной системы координат базы. Скорость конечного эффектора равна:
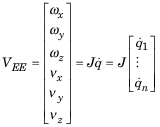
ω - скорость вращения, υ - линейная скорость и![]() - скорость пространства соединений.
- скорость пространства соединений.
Jacobian - Геометрический якобиан концевого эффектораГеометрический якобиан конечного эффектора с заданным строением, Config, возвращается как матрица 6 байт n, где n - количество степеней свободы конечного эффектора. Якобиан отображает скорость в пространстве соединений на скорость в конце эффектора относительно координатной системы координат базы. Скорость конечного эффектора равна:
ω - скорость вращения, υ - линейная скорость и![]() - скорость пространства соединений.
- скорость пространства соединений.

