3-D местоположения мировых точек совпадают между несколькими изображениями
worldPoints = triangulateMultiview(pointTracks,cameraPoses,intrinsics)pointTracks задает массив совпадающих точек. cameraPoses и intrinsics задайте информацию о положении камеры и внутренности, соответственно. Функция не учитывает искажение объектива.
[ дополнительно возвращает среднюю ошибку репроекции для каждой 3-D мировой точки, используя все входные параметры в предыдущем синтаксисе.worldPoints,reprojectionErrors]
= triangulateMultiview(___)
[ дополнительно возвращает индексы допустимых и недопустимых мировых точек. Действительные точки расположены перед камерами.worldPoints,reprojectionErrors,validIndex]
= triangulateMultiview(___)
Загрузка изображений в рабочую область.
imageDir = fullfile(toolboxdir('vision'),'visiondata','structureFromMotion'); images = imageSet(imageDir);
Загрузка предварительно вычисленных параметров камеры.
data = load(fullfile(imageDir,'cameraParams.mat'));Получите собственные параметры камеры.
intrinsics = data.cameraParams.Intrinsics;
Вычислите функции для первого изображения.
I = im2gray(read(images,1)); I = undistortImage(I,intrinsics); pointsPrev = detectSURFFeatures(I); [featuresPrev,pointsPrev] = extractFeatures(I,pointsPrev);
Загрузка расположения и ориентации камеры.
load(fullfile(imageDir,'cameraPoses.mat'));Создайте imageviewset объект.
vSet = imageviewset; vSet = addView(vSet,1,rigid3d(orientations(:,:,1),locations(1,:)),... 'Points',pointsPrev);
Вычислите функции и совпадения для остальных изображений.
for i = 2:images.Count I = im2gray(read(images,i)); I = undistortImage(I,intrinsics); points = detectSURFFeatures(I); [features,points] = extractFeatures(I,points); vSet = addView(vSet,i,rigid3d(orientations(:,:,i), locations(i,:)),... 'Points',points); pairsIdx = matchFeatures(featuresPrev,features,'MatchThreshold',5); vSet = addConnection(vSet,i-1,i,'Matches',pairsIdx); featuresPrev = features; end
Найти треки точек.
tracks = findTracks(vSet);
Возьми положения фотоаппарата.
cameraPoses = poses(vSet);
Найдите 3-D точки мира.
[xyzPoints,errors] = triangulateMultiview(tracks,cameraPoses,intrinsics); z = xyzPoints(:,3); idx = errors < 5 & z > 0 & z < 20; pcshow(xyzPoints(idx, :),'VerticalAxis','y','VerticalAxisDir','down','MarkerSize',30); hold on plotCamera(cameraPoses, 'Size', 0.2); hold off

worldPoints - 3-D мировых точек3-D мировые точки, возвращенные как N-на-3 матрица. Каждая строка представляет одну 3-D мировую точку и имеет форму [x, y, z]. N - количество 3-D мировых точек.
Типы данных: single | double
reprojectionErrors - Ошибки репроекцииОшибки репроекции, возвращенные как N-вектор. Чтобы вычислить ошибки репроекции, сначала функция проецирует каждый мир, указывая назад на каждое изображение. Затем в каждом изображении функция вычисляет расстояние между обнаруженной и перепроектированной точками. Каждый элемент reprojectionErrors выходы - это средняя ошибка репроекции для соответствующей мировой точки в worldPoints выход.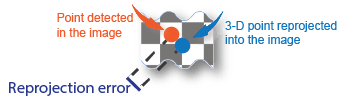
validIndex - Валидность мировых точекВалидность мировых точек, возвращенная как M-на-1 логический вектор. Действительные точки, обозначаемые как логическое 1 (true), расположены перед камерами. Недопустимые точки, обозначаемые как логические 0 (false), расположены за камерами.
Валидность мировой точки относительно положения камеры определяется путем проецирования мировой точки на изображение с помощью матрицы камеры и однородных координат. Мировая точка действительна, если полученный масштабный коэффициент положителен.
Прежде чем обнаруживать точки, исправьте изображения для искажения объектива при помощи undistortImage функция. Кроме того, вы можете непосредственно неискажать точки, используя undistortPoints функция.
[1] Хартли, Ричард и Эндрю Зиссерман. Несколько видов геометрии в Компьютерное Зрение. 2-й эд. Кембридж, Великобритания; Нью-Йорк; Cambridge University Press, 2003.
bundleAdjustment | bundleAdjustmentMotion | bundleAdjustmentStructure | estimateCameraParameters | relativeCameraPose | undistortImage | undistortPoints