

Видение стерео - это процесс восстановления глубины от изображений камеры путем сравнения двух или более видов одной и той же сцены. Выходы этого расчета являются 3-D облаком точек, где каждая 3-D точка соответствует пикселю на одном из изображений.
Выпрямление стерео-изображений проецирует изображения на общую плоскость изображения таким образом, чтобы соответствующие точки имели одинаковые координаты строк. Этот процесс полезен для стерео-зрения, потому что 2-D проблема стерео соответствия сводится к 1-D задаче. В качестве примера выпрямление стерео-изображений часто используется в качестве шага предварительной обработки для вычисления несоответствия или создания анаглифовых изображений.
| Camera Calibrator | Оцените геометрические параметры одной камеры |
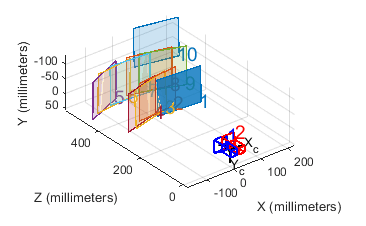
| Stereo Camera Calibrator | Оцените геометрические параметры стереофотоаппарата |
Задайте индексы пикселей, пространственные координаты и 3-D системы координат
Stereo Camera Calibrator приложение
Калибровка стереофотоаппарата, которую затем можно использовать, чтобы восстановить глубину изображения.

